approche diphasique du changement de phase avec

Résumé pour le 1er colloque du GDR interactions fluide-structure - 26-27 sept. 2005
APPROCHE BIPHASIQUE DU CHANGEMENT DE PHASE AVEC
INTERACTION LIQUIDE-SOLIDE
Rodolphe LANRIVAIN†, Luisa SILVA, Thierry COUPEZ
CEMEF, Ecole des Mines de Paris, B.P. 207, 06904 Sophia Antipolis Cedex, France,
1 Introduction
L’objectif du modèle présenté ici est de simuler la solidification d’un polymère dans le cadre de
l’injection et du logiciel Rem3D [5]. Classiquement, on traite le changement de phase en assimilant
le polymère solidifié à un fluide de très forte viscosité et, ou, via l’imposition d’une température de
non-écoulement. Ce type d’approche ne rend compte, ni du comportement réel des parties solidifiées,
ni des interactions entre ces parties et le fluide en écoulement, et conduit à des difficultés numériques
tel que des matrices très mal conditionnées.
Afin de s’affranchir de ces limitations, nous proposons un modèle biphasique de type Liquide/Solide.
Ce modèle s’appuie sur la théorie des mélanges [2], [4]. On introduit un paramètre scalaire, la fraction
de phase qui quantifie la présence chaque phase supposée présente en chaque point du domaine. Une
fois fixées les lois de comportement associées au liquide et au solide, nous présentons le couplage
de type friction retenu. En utilisant une méthode éléments finis mixtes dans un cadre eulérien , nous
calculons à partir d’un unique système l’ensemble des variables cinématiques liquide et solide.
Enfin, nous proposons une extension originale de la formulation afin de traiter le changement de
phase. Cette formulation repose sur un bilan de masse du milieu biphasé en cours de transformation.
2 Modélisation biphasique liquide/solide
On considère un domaine Ωconstitué de deux de phases, l’une liquide, l’autre solide, occupant
respectivement les sous-domaines Ωlet Ωs. On suppose le milieu saturé ce qui implique que seules
ces deux phases sont présentes. Suivant le cadre de la théorie des mélanges, on introduit la fraction
volumique de la phase liquide αdéfinie par :
αi(X, t) = ½1si X∈Ωi
0si X∈ΩÂΩi
, i ∈ {l, s}(1)
αl=αet αs= 1 −α
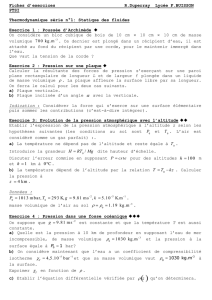
Dans le cadre général d’un problème faisant intervenir deux phases, un liquide et un solide, notre
objectif est de parvenir à un modèle unique capable de traiter les trois configurations types illustrées
figure 1.
La principale différence entre ces trois problèmes est la définition du paramètre αqui peut être
constant (modèle statique et homogène), fonction uniquement de l’espace (problème statique) ou
fonction de l’espace et du temps (problème dynamique).

Résumé pour le 1er colloque du GDR interactions fluide-structure - 26-27 sept. 2005
C
BA
Solide
Liqude
Mélange
FIG. 1 – Répartition des phases pour trois problèmes biphasiques types : AMélange homogène; B
Répartition statique des phases; CProblème dynamique de type changement de phase
2.1 Lois de comportement et couplage cinématique
En négligant les termes d’inertie (approximation licite en injection de polymère) et décomposant
les containtes en contribution liquide et solide, l’équilibre dynamique du milieu est équivalent à un
système de deux équations d’équilibre, l’une liquide, l’autre solide :
∇.σ = 0
σ=σl+σs¾⇒ ∇.σl=−∇.σs=F⇒½∇.σl=F
∇.σs=−F(2)
Nous associons à chaque phase une loi de comportement spécifique. Il vient alors :
– Le domaine liquide Ωl
On a un liquide newtonien qui vérifie les équations de Stokes :
½∇.¡2ηǫ(v)¢− ∇pl=F
−∇.v = 0 (3)
– Le domaine solide élastique Ωs
La loi de comportement linéarisée d’un solide élastique, sous l’hypothèse des petites défor-
mations, est décrite ici dans le cadre d’une formulation mixte déplacement(u)/pression(ps) via
l’introduction du module de compressiblité K=3λ+2µ
3(λet µcoefficents de Lamé) [3].
∇.(2µǫ(u)−2µ
3(∇.u)I)− ∇ps=−F
−∇.u −1
Kps= 0 (4)
On choisit de modéliser F par une force de friction. Cete force, entre un solide soumis à un déplace-
ment uet un liquide de vitesse v, s’exprime par :
F=k¡vs−v¢=k¡du
dt−v¢(5)
avec k coefficient d’interaction entre les phases. Cette force agit à l’interface (diffuse ou non) liquide-
solide.
2.2 Système biphasique unique
Le système décrivant l’ensemble des variables cinématiques du problème s’obtient en exprimant
les systèmes (3) et (4) sur Ωet en définissant une équation d’évolution sur α. On obtient alors :

Résumé pour le 1er colloque du GDR interactions fluide-structure - 26-27 sept. 2005
∀X∈Ω(X, t),touver(v, pl, u, ps, α)/
α∇.¡2ηǫ(v)¢− ∇pl=k¡du
dt−v¢(6.1)
−∇.v = 0 (6.2)
(1 −α)∇.¡2µǫ(u)−2µ
3(∇.u)I¢− ∇ps=−k¡du
dt−v¢(6.3)
−∇.u −1
Kps= 0 (6.4)
dα
dt =f(X, t) (6.5)
(6)
Dans ce système, les champs (v, pl, u, ps)sont définis sur l’ensemble du domaine car la relation de
couplage est également étendue à tout le domaine et permet d’assurer le prolongement de ces champs
sur les sous-domaines de Ωtels que α= 0 ou 1.
2.3 Formulation éléments finis et méthode de résolution
La résolution de l’équation d’évolution de αest découplée du système 6. Connaissant αen chaque
point du domaine, on calcule, à partir d’un unique système les quatres inconnues cinématiques du
problème.
Al+FkBl−Fk0
tBl−Dl0 0
−tFk0As+FkBs
0 0 tBs−Cs−Ds
v
pl
u
ps
=
Fk
0
Fk
0
(7)
L’obtention du système se fait via une discrétisation éléments finis P1+/P1/P1+/P1. La condensation
des termes de bulles, effectuée sur les sous-blocs liquide et solide, génère les matrices Dlet Ds. La
relation de couplage, au second membre des équations (6.1) et (6.3), est traiter de manière semi-
implicite car un schéma explicite est appliqué à la dérivée convective du champ de déplacement.
3 Extension du modèle au changement de phase
L’extension du modèle au changement de phase nécessite l’écriture d’un bilan de masse sur l’en-
semble du système. On introduit la masse volumique totale par une loi de mélange :
ρ=αρl+ (1 −α)ρs(8)
avec ρl(resp. ρs) masse volumique du solide (resp. liquide).
On peut montrer que la conservation de la masse totale du domaine Ωs’exprime en fonction de
l’évolution de la fraction de phase comme suit :
∇.v +1
ρ
dρ
dt =∇.v +1
ρ(ρl−ρs)dα
dt ) = 0 (9)
Nous traduisons la compressibilité de la phase solide par l’équation d’état sur la masse volumique
solide suivante fonction le masse volumique du solide au repos :
ρs=ρ0
s(1 + ∇.u)(10)
En remplaçant l’équation (6.2) par l’équation (9) dans le système biphasique (6), on étend le modèle
biphasique proposé à des problèmes de type changement de phase.

Résumé pour le 1er colloque du GDR interactions fluide-structure - 26-27 sept. 2005
FIG. 2 – Evolution temporelle de αet norme du champ du vitesse sur la configuration déformée (via
le post-processeur)
La figure 2 illustre un exemple de changement de phase homogène. La masse volumique solide est
supérieure à celle liquide, et le milieu initialement liquide se solidifie en suivant une loi d’évolution de
type Avrami homogène, issue de la cristalisation [1] (ie αfonction du temps uniquement). A mesure
que le taux de phase solide augmente, le domaine se contracte pour assurer la conservation de la
masse.
4 Conclusion
Nous avons présenté un modèle biphasique de type liquide-solide basé sur la théorie des mé-
langes. A partir de la résolution d’un unique système, ce modèle permet de calculer l’ensemble des
variables cinématiques (vitesse, déplacement et pressions) d’un milieu biphasé quelconque (voir fi-
gure 1).
La résolution directe du système, par une méthode GMRES présonditionnée, s’est avérée très robuste,
puisque permettant de traiter un problème mettant en jeu des paramètres matériaux d’ordre de gran-
deur très différent ( viscosité ( ∼1.10−03Mpa.s) et module Young (∼1.10+02Mpa).
L’extension du modèle au changement de phase permet d’ores et déjà d’obtenir une déformée d’un
milieu solidifié. Il sera bien sur nécessaire de consolider le modèle et d’amener une physique plus
réaliste du changement de phase.
Références
[1] AVRAMI, M. Kinetics of phase change. I . J. Chem. Phys. 7, 1-2 (1939), 1103–1112.
[2] BOWEN, R. Theory of mixtures. Continuum Physics 3(1976), Part 1.
[3] KLAAS, O., MANIATTY, A., AND SHEPHARD, M. S. A stabilized mixed finite element method for finite
elasticity. : Formulation for linear displacement and pressure interpolation. Computer Methods in Applied
Mechanics and Engineering 180, 1-2 (1999), 65–79.
[4] KRISHNASWAMY, S., AND BATRA, R. A Thermomechanical Theory of Solid-Fluid Mixtures. Mathema-
tics and Mechanis of Solids 2(1997), 143–151.
[5] SILVA, L., BARRÉ, M., DIGONNET, H., GRUAU, C., RODRIGUÈS-VILLA, A., AGASSANT, J., AND
COUPEZ, T. Avancement et perspectives de la simulation numérique tri-dimensionnelle de l’injection de
polymères. 16ème CFM (2003), 6.
1
/
4
100%