Cours 1-5

IUT de Nice Côte d’Azur
Département Informatique
Cours Architecture des ordinateurs 1/2
Année 2006/2007
1
Cours Architecture des
Ordinateurs
1ère Année
IUT de Nice- Côte d’Azur
Département Informatique
Marie-Agnès PERALDI-FRATI
Maître de Conférences
map@unice.fr
M.-A. Peraldi-Frati- IUT de Nice Dép. Informatique
2
Organisation de ce cours
• Cours , TD, TP = 25h
– 6 séances de cours
– 3 séances de TD
– 7 séances de TP
• Evaluation :
– 2 examens de contrôle continu
– 1 examen final
• Dates :
– Début du cours : 5 septembre
– Fin du cours 12 Décembre (Examen final):
• Intervenants :
– Marie-Agnès Peraldi-Frati
– Erol Acundeger
– Gurvan Huiban
M.-A. Peraldi-Frati- IUT de Nice Dép. Informatique

IUT de Nice Côte d’Azur
Département Informatique
Cours Architecture des ordinateurs 1/2
Année 2006/2007
3
Objectif du cours
• De quoi est composé un ordinateur :
microprocesseur, des mémoires, disque dur …?
• Quels sont les modèles sous-jacents au
fonctionnement d’une machine ?
• Comment s’exécutent des programmes sur un
ordinateur ?
• Quel est le lien entre le logiciel et le matériel ?
• Comment se fait l’interface avec l’extérieur ?
(fonctionnement des divers périphériques)
M.-A. Peraldi-Frati- IUT de Nice Dép. Informatique
4
Plan
• Introduction
– Différentes vues d ’un ordinateur
– Evolution et performance des machines
• Représentation de l’information
• Algèbre de Boole
• Circuits séquentiels/Automates
• Architecture type Von Neumann
– Structure d’interconnexion : bus
– La mémoire
– l’unité centrale
• Exemple d ’un processeur Intel Pentium
• Couche d’assemblage
– langage
– Modes d ’adressage
– Procédures
M.-A. Peraldi-Frati- IUT de Nice Dép. Informatique

IUT de Nice Côte d’Azur
Département Informatique
Cours Architecture des ordinateurs 1/2
Année 2006/2007
5
Introduction
Les différentes « vues » d’un ordinateur
–Vue services
–Vue matérielle
–Vue fonctionnelle
M.-A. Peraldi-Frati- IUT de Nice Dép. Informatique
6
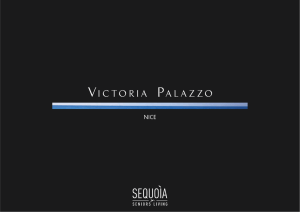
Services rendus par un ordinateur
Traitement des données
Rangement des données
Echange des données
Contrôle
Stockage de
l’information
Traitement des données
Transfert des
données
M.-A. Peraldi-Frati- IUT de Nice Dép. Informatique

IUT de Nice Côte d’Azur
Département Informatique
Cours Architecture des ordinateurs 1/2
Année 2006/2007
7
Introduction
Les différentes « vues » d’un ordinateur
–Vue services
–Vue matérielle
–Vue fonctionnelle
M.-A. Peraldi-Frati- IUT de Nice Dép. Informatique
8
Décomposition matérielle d’un
ordinateur
• Un ordinateur est constitué de plusieurs parties :
– souris
– écran
– clavier
–unité centrale
– lecteur de disquettes ...
• A l’intérieur de l’unité centrale
– une carte mère
– une carte vidéo
– des disques ....
• Sur la carte mère
– un microprocesseur
– de la mémoire (ROM, RAM) ...
• Dans le microprocesseur la puce
M.-A. Peraldi-Frati- IUT de Nice Dép. Informatique

IUT de Nice Côte d’Azur
Département Informatique
Cours Architecture des ordinateurs 1/2
Année 2006/2007
9
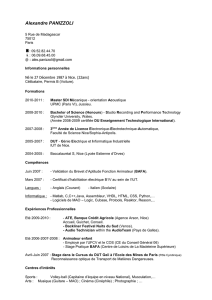
Constitution d’une Puce
Illustration de la loi de Moore
http://www.intel.com/research/silicon/mooreslaw.htm )
•Une puce est un carré de silicium constitué de millions de transistors
•l’intégration des transistors sur une puce suit la loi de Moore
M.-A. Peraldi-Frati- IUT de Nice Dép. Informatique
10
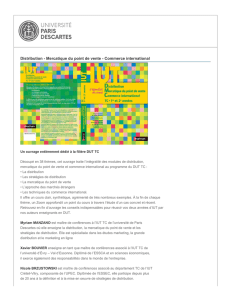
Fabrication d’une puce
• Du Silicium (SI) …du sable… après l’oxygène, le constituant le plus
massif et le plus répandu sur Terre.
• Un barreau de Silicium fabriqué dans un four à très haute
température
• Un Wafer (disque de Silicium Dopé) 30 cm de diamètre
• Silicium est un semi-conducteur (certaines parties peuvent être
plus ou moins conductrices)
• Dépôt de couches de substrat
– (dépôt d’un produit photosensible , zones imprimées par ultraviolet,
acide pour le décapage des zones, dépôt d’impuretés pour créer la
connectivité)
• Création de transistors inter-connectés => plusieurs puces sur un
wafer
• Découpage de la puce et tests
• Mise en boîtier et connexion des pattes du support avec les points
de contacts de la puce => le microprocesseur
• 140 Millions de transistors sur le microprocesseur HP PA850
• Prix d’un transistor => 1$ en 1968 0,0000001$ en 2002
M.-A. Peraldi-Frati- IUT de Nice Dép. Informatique
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
1
/
199
100%