Moteur à courant continu 1. Schéma fonctionnel Le moteur est

Moteur à courant continu
1. Schéma fonctionnel
moteur à
courant continu
Conversion
d’énergie électrique
en énergie mécanique
énergie
électrique
fournie
énergie
mécanique
utilisable
Le moteur est alimenté en énergie électrique : différence de potentiels U et courant I continus,
l’énergie utilisable est mécanique (rotation), elle est caractérisée par le couple utile et la vitesse .
2. Définitions
Couple : Le moment d’un couple de forces est la somme des moments de chaque force, on
ne fait pas la distinction entre le terme moment et le terme couple et on parle du couple
moteur. La somme des couples de forces qui agissent sur le rotor d’un moteur est appelée
couple électromagnétique en N.m (Newton mètre). Chaque enroulement du rotor produit
un couple.
Vitesse : Elle est exprimée en tour par minute (n en tr/min) ou en radian par seconde ( en
rd/s). La relation entre et n est donnée par :
60
2π
n(tr/minΩ(rd/s) )
Puissance : On appel puissance utile du moteur la valeur ΩPutile
Avec : o P en W
o en N.m
o en rd/s
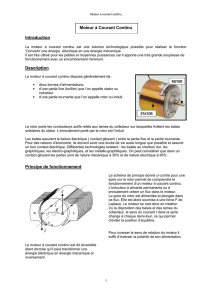
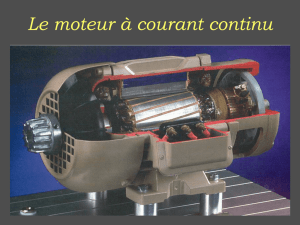
3. Constitution
Le stator ou inducteur est la partie
fixe du moteur, c’est cette partie qui
permet la création du flux
d’induction. Ce flux peut être créé
soit par un aimant permanent, soit
par les enroulements d’inducteur qui
devront être alimentés.
Le rotor ou induit est la partie mobile
du moteur, les enroulements d’induit
sont bobinés dans des encoches, ils
sont alimentés par le collecteur sur
lequel viennent frotter des balais,
généralement en graphite, installés
sur la partie fixe du moteur.

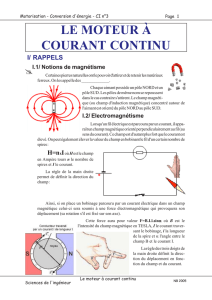
4. Loi de Laplace :
Un conducteur de longueur L parcouru par un
courant I et placé dans un champ magnétique
B est soumis à une force F telle que :
B
L
I
F
B en tesla (T)
F en newton (N)
I en ampère (A)
L en mètre (m)
5. Principe de fonctionnement
Le schéma de principe représente une spire du bobinage d’induit, cette spire est placée dans
un champ magnétique B et elle est parcourue par un courant I, elle est donc soumise à une
force de Laplace F. Le couple de forces qui s’exerce sur la bobine produit la rotation de celle-
ci.
La spire étant alimentée par le dispositif balais-collecteur, le sens du courant dans la spire
s’inverse à chaque demi-tour ce qui permet de conserver le sens de rotation.
Définitions
o La somme des moments des couples est appelée couple électromagnétique.
o Un moteur à courant continu peut tourner dans les deux sens de rotation
o Le champ magnétique peut être créé par un aimant permanent ou par des bobinages
qu’il faut alimenter.
o Un moteur à courant continu est une machine réversible, il peut fonctionner en
génératrice (dynamo).
Relations
o On appel E en volt (V), la somme des forces électromotrices (f.e.m.) qui sont créées
dans chacune des spires alimentées.

o On appel I en ampère (A), la somme des courants parcourant les spires de l’induit.
o On appel en weber (Wb), le flux créé par le stator (le flux du champ magnétique
uniforme B au travers d’une surface S est nBS
ou
n
est le vecteur unitaire
normal à la surface S).
o On appel en newton mètre (Nm), le couple électromagnétique disponible sur l’arbre
moteur.
Il vient : ΩKE
K est une constante fonction du moteur
IK
(nombre de spires, nombre de bobines)
De ces deux expressions on tire :
Ω
I
E
Le produit
I
E
est appelé puissance électromotrice en Watt (W).
6. Schéma équivalent, modèle
Le circuit équivalent de l’induit se modélise sous deux formes :
o En régime non établi
o En régime établi (le courant i est constant)
7. Puissances, rendement
o Puissance absorbée : c’est la somme des puissances absorbées dans l’induit
et dans l’inducteur
o Dans l’induit induitinduitinduit IUP
o Dans l’inducteur inducteurinducteurinducteur IUP il faut noter que cette
puissance est nulle dans le cas d’un moteur à aimant permanent
o Pertes
o Les pertes par effet Joule dans l’induit et l’inducteur
2
induit
JIRP
inducteurinducteurinducteur IUP la puissance absorbée dans
l’inducteur est dissipée en chaleur.
o Les pertes mécaniques dues aux frottements
Ce schéma électrique conduit à
l’équation de maille suivante :
i(t)RE(t)
dt
di(t)
LU(t)
En régime permanent le terme 0
dt
di(t)
donc IREU(t)

o Les pertes électromagnétiques dues aux courants de Foucault et à la
saturation magnétique.
o Puissance utile : c’est la puissance mécanique sur l’arbre moteur
ΩPuutile
o Rendement
Le rendement est donc : utile u
fournie inducteur
PΓ× Ω
η = =
P P + U × I
8. Caractéristiques moteur à courant continu.
Exemple : REFERENCE DU MOTEUR: 82840
0 représente la vitesse du moteur sans
charge pour le courant à vide, n est la vitesse
en charge pour le courant nominal
d représente le couple de démarrage, 0 est
la vitesse à vide. Le couple (F, F) est obtenu
au point de fonctionnement du moteur lorsque
le couple moteur est égal au couple résistant.

 6
7
6
7
1
/
7
100%