204 Ko

Page 50
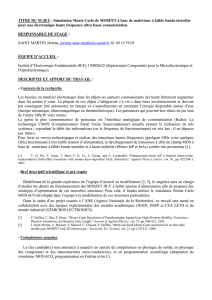
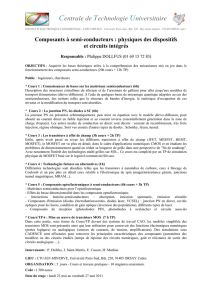
3/ Commande P.W.M
Fig 18 Commande P.W.M+Type de modulation

Page 51
Pour obtenir une tension continu variable en sortie du hacheur, il faut faire varier le rapport
cyclique D.
Dans ce but, on utilise un dispositif de contrôle qui permet de faire varier le rapport
cyclique à partir du signal de commande fourni par la boucle de courant(VcI).
Ce dispositif de contrôle compare la tension de commande à une tension auxiliaire de
forme triangulaire. La comparaison entre les deux tensions permet de fournir un signal logique
pour commander les quatre transistors MOSFETs.
3.1/ Générateur de fonction carr é-triangle
Nous invitons le lecteur à se reporter au schéma de la fig 18(cf page 50). Voyons à présent
les allures des signaux.
Les valeurs des seuils de basculement pour le comparateur à hystérésis (trigger) sont :
La fréquence de fonctionnement du signal triangulaire (fréquence de découpage du
variateur) est définie par la relation:
L’amplitude du signal triangulaire est définie par les seuils de basculement.
3.2/ Modulation + E , -E
3.2.1/ Principe
La différence entre le signal de commande et le signal triangulaire est appliquée à l’entrée
d’un comparateur (cf fig 18).
Le comparateur posséde un hystèrésis très faible afin d’avoir une immunité aux parasites
éventuels.
+
-Vcc
+
-

Page 52
L’effet de l’hystèrésis peut être négligé pour l’étude du fonctionnement . Nous pouvons à
présent représenter l’allure des signaux logiques de commande des transistors MOSFETs.
Nous constatons que les transistors Q1 et Q2 sont commander en opposition (idem pour
Q4 et Q3) et que les transistors Q1 et Q4 (idem pour Q2 et Q3) sont commandés simultanément .
De plus, les signaux de commande d’un même bras ne doivent jamais être en même temps
au niveau logique 1, pour ne pas provoquer un court-circuit dans les bras du hacheur.
A cet effet, on doit introduire un temps mort de quelques µs pendant lequel tous les
MOSFETs sont bloqués. Ce temps mort (delay time) est généré par le driver IR 2130.
3.2.2/
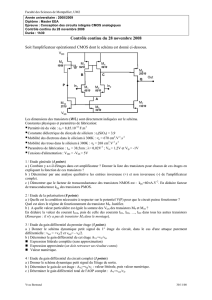
Avantage et inconv énient de la modulation + E , - E
Avantage :
Ce type de modulation ne pose aucun problème lors de l’inversion de la polarité du courant
d’induit .Pour ce faire, examinons les formes d’ondes suivantes:
V cI
Cde Q1 Q4
Cde Q2
-
+ E
Vc
Cde Q1
Cde Q2
KQ1
Q4 D2
D3 Q1
Q4 D2
D3 Q1
Q4 D2
D3 Q2
Q3 D1
D4 Q2
Q3 D1
D4 Q2
Q3D1
D4 Q2
Q3
Vc
I

Page 53
Avant de s’annuler le courant passe à travers les diodes D2D3 , ces dernières se bloquent
lors de l’annulation du courant.
Le courant peut alors continuer à circuler avec la polarité opposée par les transistors Q2Q3.
Inconvénient :
La valeur maximale de l’ondulation est donnée par la relation suivante:
∆icmax E
2LF
=××
avec L = inductance de lissage + inductance moteur
Nous remarquons que l’ondulation du courant est inversement proportionnelle à
l’inductance L mais aussi à la fréquence F. Cette ondulation est trop élevée.
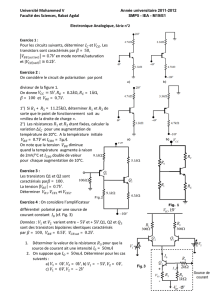
3.3/ Modulation + E 0 -E
3.3.1/ Principe
Nous invitons le lecteur à se reporter aux formes d’ondes suivantes.
Signal de commande positif
Nous pouvons à présent représenter l’allure des signaux logiques de commande des
transistors MOSFETs .
+ V cI
Q1
Q4 D2
Q4 Q1
Q4 Q
1Q1
Q4 D
2Q1
Q4 Q
1Q1
Q4 D
2Q
1Q
1Q1
Q4 D2
Q4Q1
Q4Q1
D3 Q1
Q4D2
Q4 Q1
Q4Q
1Q1
Q4D2
Q4
Q1
D3
D1
D4 Q2
D4 D1
D4 D
1D1
D4 Q
2D1
D4 D
1D1
D4 Q
2D
1D
1D1
D4 Q2
D4D1
D4 D1
Q3D1
D4 Q2
D4 D1
D4 D
1D1
D4 Q2
D4
D1
Q3
Cde
Cde
Cde
Cde
Vc Ic
Vc
Ic
K
passants
K
passants
- V cI

Page 54
Signal de commande n égatif
Voyons l’allure des signaux logiques de commande des transistors MOSFETs.
3.3.2/ Avantage
L’ondulation de courant est moins élevée que pour la modulation + E - E. La valeur
maximale de l’ondulation est donnée par la relation suivante:
∆icmax E
4LF
=××
avec L = inductance de lissage + inductance moteur
3.4/ Remarque
Grâce à la technique PWM, l’ondulation sur le courant d’induit et par conséquent aussi sur
le couple électromagnétique du moteur est très réduite et peut être pratiquement négligée.
+ V cI
- V cI
Cde
Cde
Cde
Cde
Vc
- E
Vc
- E
Ic
Ic
 6
7
8
9
10
11
6
7
8
9
10
11
1
/
11
100%