CH 20: MOUVEMENT ET VITESSE Objectifs: *Reconnaître si un

CH 20:
MOUVEMENT ET VITESSE
Objectifs:
*Reconna
î
tre si un objet est en mouvement ou pas par rapport
àun autre objet.
*Calculer une vitesse moyenne.
*Reconna
î
tre un mouvement acc
é
l
é
r
é
, uniforme, ralenti.
Noter sur le cahier de texte pour la séance prochaine
Ex
:6,8,10,11,13,15,16 et 17
p178
-
179
ED et FM:p175,176
Ex
:6,8,10,11,13,15,16 et 17
p178
-
179
ED et FM:p175,176
*Savoir interpr
é
ter un graphique repr
é
sentant la distance ou
la vitesse en fonction du temps.
*Application: s
é
curit
é
routi
è
re.

I) Mouvement et trajectoire
:
A) Mouvement d'un objet.
Une personne Z ,immobile, se trouve sur
le trottoir,
C
’
est
moi !
Personne Z
une voiture en mouvement
contenant deux personnes X et Y
moi
c
’
est X
Et moi
c
’
est Y
Comment peut
-
on d
é
crire les diff
é
rents
objets les uns par rapport aux autres ?

1)
La voiture par rapport
à
la route ?
2)
La voiture par rapport
à
Z ?
3)
X et Y par rapport
à
la terre ?
En mouvement
.
En mouvement
.
En mouvement
.
4)
X et Y par rapport
à
la voiture ?
Immobile
.


Le mouvement d'un objet est d
é
crit par rapport
à
un autre objet qui sert
de réfé
rence ou
r
é
f
é
rentiel.
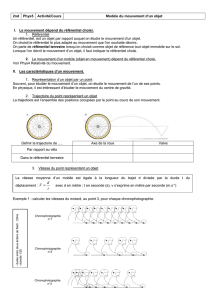
B) Trajectoire d'un point.
Référentiel de laboratoire =
Référentiel h
é
liocentrique:
La trajectoire d'un point d'un mobile est une courbe qui repr
é
sente les
différentes positions occup
é
es par ce point lors de son mouvement.
Si la courbe est quelconque, la trajectoire sera dite
Si la courbe est une droite la trajectoire sera
Si la figure est un cercle, la trajectoire sera
A) Mouvement d'un objet.
r
é
f
é
rentiel
terrestre
.
on prend le
soleil
comme origine et trois
étoiles
é
loign
é
es.
curviligne.
rectiligne.
circulaire.
 6
7
8
9
10
11
12
13
6
7
8
9
10
11
12
13
1
/
13
100%