1 - Notions de biomecanique

Aurore IDZIKOWSKI
Kevin CHEVALIER 1
NOTIONS DE BIOMECANIQUE
I. Ostéo-articulaire
A. Les contraintes
Les os sont soumis à de nombreuses contraintes :
En pression
En torsion
En traction
En cisaillement
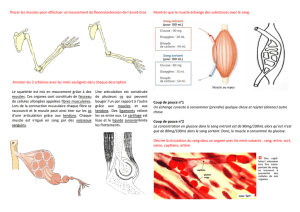
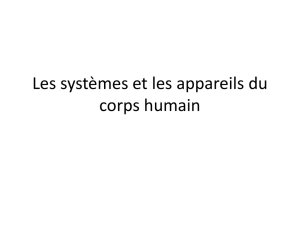
1. Contrainte en pression : exemple du membre inférieur
Lorsque nous sommes debout (en appui bipodal donc) le poids du corps passe par le milieu du
bassin. Ce poids entraine une contrainte en pression sur l’ensemble du membre inférieur.
La hanche est axée sur le genou et la cheville, donc de chaque côté il y a la moitié du poids qui
s’exerce.
Lorsqu'on va réaliser un appui unipodal on va lever un pied et tenir sur l’autre pied. Le poids exercé
est accentué. En effet, au poids du corps on doit rajouter le poids du membre inférieur levé.
Le poids ne s’exerce plus au milieu mais il est déporté du côté gauche.
Ainsi, la force exercée est plus grande et est décalée.

Aurore IDZIKOWSKI
Kevin CHEVALIER 2
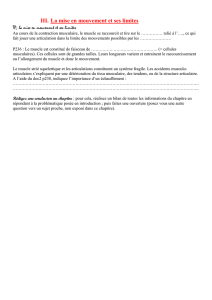
2. Contrainte en traction : exemple du membre supérieur
On a une force de traction au niveau de la main due au port d'une charge. Comme il n'y a pas
d’articulation entre le radius et l’humérus la force va devoir transiter par l'ulna.
B. Notion de position
Aux niveaux des articulations métacarpo-phalangiennes (sphéroïdes) : le ligament est détendu en
extension et tendu en flexion. Si on se relâche, on a tendance à se placer dans une position où les
ligaments sont détendus (on peut ici faire l'analogie avec un élastique). Cette position est dite
position de repos, qui dépend :
De la traction des ligaments
Du tonus
Cette position est celle pris spontanément quand une personne tombe dans le coma ou quand on
dort.

Aurore IDZIKOWSKI
Kevin CHEVALIER 3
A l’inverse, on a une position de fonction, où les ligaments sont tendus, et l’articulation est donc
stable et peut être utilisée.
En cas d’immobilisation, il faut toujours immobiliser les tendons en position de fonction sinon on
risque d'avoir un raccourcissement du tendon durant l'immobilisation, pouvant générer une
incapacité à réaliser le mouvement après.
Entre ces deux positions, il y a la position de confort, qui permet de préserver une fonction tout en
reposant l'articulation.
C. Aspect dynamique
La dynamique des articulations est due à leur forme.
Exemple du genou : En avant, les rayons de courbures sont grands puis diminuent pour ré-augmenter
en arrière.
Pour simplifier cette dynamique on va prendre la moyenne de ces rayons de courbures.
II. Myologie
A. Rappel sur la composition d’un muscle

Aurore IDZIKOWSKI
Kevin CHEVALIER 4
Les muscles sont composés de deux éléments essentiels : un ventre suivit d’un tendon ou d’une
aponévrose.
Seul le corps musculaire peut se contracter, le tendon ne se contracte pas. Il peut se raccourcir
jusqu’à 50% de la longueur du ventre musculaire. Ainsi, la totalité de la contraction en comptant les
tendons, est d’environ 30%.
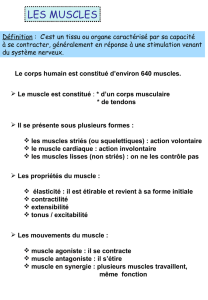
B. Muscles longs et muscles courts
1. Muscle long
Lorsqu’il se contracte, il se raccourcit en parcourant une grande distance D. Plus un muscle est long,
plus il peut se raccourcir d’une grande distance, plus l’amplitude sera grande, mais le temps de
contraction sera plus long. Comme leurs fibres sont de grandes tailles, ce sont des muscles puissants
mais peu précis.
Ce sont donc les muscles des actions puissantes, amples, mais ils sont lents et peu précis.
2. Muscle court
Ils ont un petit corps musculaire, qui se contracte donc sur une petite distance d. Plus la distance est
petite, plus l’amplitude sera faible. Comme ce sont des muscles petits ils se contractent vite. Ils sont
très précis mais peu puissants.
Ce sont donc des muscles rapides et précis mais peu amples et peu puissants.
3. Muscles isométriques
Quand un muscle se contracte mais qu'il n'y a pas de changement de sa longueur, on parle de
muscles isométriques qui permettent de stabiliser les articulations.

Aurore IDZIKOWSKI
Kevin CHEVALIER 5
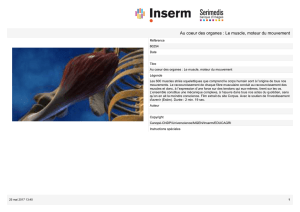
C. Force d’un muscle
1. Généralités
La force du muscle dépend de sa grandeur et de son volume qui correspond à son nombre de fibres.
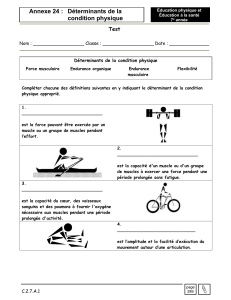
Ici on a un muscle fléchisseur qui permet, selon quelle partie on immobilise, de fléchir l'avant bras
sur le bras (𝐹
𝑏𝑎
⃗
⃗
⃗
⃗
⃗
⃗
) ou le bras sur l'avant bras (𝐹
𝑎𝑏
⃗
⃗
⃗
⃗
⃗
⃗
)
Le vecteur force 𝐹
peut être placé dans un repère orthonormé. On le décompose en deux forces :
Le vecteur 𝐹
𝑑
⃗
⃗
⃗
⃗
: force dynamique perpendiculaire à l’axe, passant par le point d’application de la
force. C’est elle qui va occasionner le mouvement.
Le vecteur 𝐹
𝑎
⃗
⃗
⃗
. Cette force 𝐹
𝑎
⃗
⃗
⃗
ne sert à rien car elle s’exerce vers le centre. C’est une force axiale
qui sert à coapter (ou décoapter) l’articulation.
2. Facteurs influençant l'action du muscle
Ainsi, en réalité, pour un même muscle ce qui est important c'est la direction du vecteur force car
cela va modifier la composante dynamique. Ainsi la force du muscle dépendra de son orientation.
Donc l’action du muscle dépend de son orientation, de son volume (nombre de fibres musculaires),
de son lieu d’insertion par rapport au centre O et de la position de l’articulation.
 6
7
8
6
7
8
1
/
8
100%