Comportement sismique des ossatures en éléments industrialisés

LES ÉDITIONS DU CERIB
Comportement sismique
des ossatures en éléments
industrialisés en béton :
justifi cations pour l’application
de l’Eurocode 8
Seismic behavior of precast concrete
frames background for the application
to Eurocode 8
Produits
Systèmes
145.E

AdC/AL/CV/MA
PO 098 / Produits - Systèmes
Réf. 145.E
Juin 2009
par
André de CHEFDEBIEN
Adel LACHIHAB
Céline VINOT
Comportement sismique
des ossatures en éléments
industrialisés en béton :
justi cations pour l’application
de l’Eurocode 8
Seismic behavior of precast
concrete frames background
for the application
to Eurocode 8
issn 0249-6224
ean 9782857552253

2
Études et Recherches
© CERIB – 28 Épernon
145.E – juin 2009 - ISSN 0249-6224 – EAN 9782857552253
Tous droits de traduction, d’adaptation et de reproduction
par tous procédés réservés pour tous pays
La loi du 11 mars 1957 n’autorisant, aux termes des alinéas 2 et 3 de l’article 41,
d’une part, que les « copies ou reproductions strictement réservées à l’usage
privé du copiste et non destinées à une utilisation collective » et, d’autre part,
que les analyses et les courtes citations dans un but d’exemple et d’illustration,
« toute représentation ou reproduction intégrale, ou partielle, faite sans le
consentement de l’auteur ou de ses ayants droit ou ayants cause, est illicite »
(alinéa 1er de l’article 40).
Cette représentation ou reproduction, par quelque procédé que ce soit,
constituerait donc une contrefaçon sanctionnée par les articles 425 et suivants
du Code pénal.

Études et Recherches
3
SOMMAIRE
Introduction ................................................................................................ 5
1. Synthèse du retour d’expérience du comportement des structures en éléments
préfabriqués soumises à un séisme ............................................................. 7
1.1. Analyse des défauts de comportement constatés ....................................................7
1.2. Projet européen : ECOLEADER – Seismic behaviour of reinforced concrete industrial
buildings .........................................................................................................9
1.3. Comportement lors du séisme du Frioul [20] ........................................................13
2. Justifi cation des valeurs de coeffi cient de comportement et de la rigidité
forfaitaire ............................................................................................ 15
2.1. Méthodologie de vérifi cation par la méthode push-over ; prise en compte de
l’amortissement hystérétique .............................................................................15
2.2. Application de la méthode à un poteau de 6 m et comparaisons avec les calculs
élastiques ....................................................................................................... 20
2.3. Comparaisons avec les résultats des essais ECOLEADER ......................................24
2.4. Étude paramétrée de la demande en ductilité .....................................................32
3. Méthode d’analyse modale appliquée aux bâtiments avec mezzanine ................ 35
3.1. Bâtiments avec mezzanine ...............................................................................35
3.2. Équilibre dynamique ........................................................................................35
3.3. Valeurs maximales par mode ............................................................................37
3.4. Valeurs maximales de la réponse totale ..............................................................37
4. Infl uence sur le comportement sismique d’une ossature de la présence d’un joint
de dilatation ......................................................................................... 41
4.1. Modélisation de la structure ................................................................................41
4.2. Modélisation du comportement du joint de dilatation .............................................42
4.3. Simulation par la méthode des éléments fi nis ........................................................43
4.4. Conclusion .......................................................................................................50

4
Études et Recherches
5. Étude du comportement tridimensionnel des bâtiments à toitures souples ........... 51
5.1. Modèle de bâtiment ..........................................................................................51
5.2. Résultats ...........................................................................................................53
5.3. Conclusion .......................................................................................................55
6. Conclusions générales ............................................................................ 56
Bibliographie ............................................................................................ 57
Annexe 1 – Modélisation du béton armé ....................................................... 59
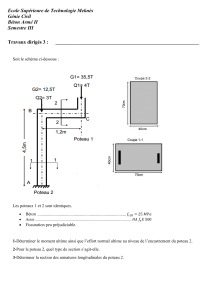
Annexe II – Exemple bâtiment industriel .......................................................... 67
Annexe III – Essais Ecoleader – Résultats calcul élastique pour le poteau
« équivalent » .......................................................................... 69
Annexe IV – Résultats de l’étude paramétrée ................................................... 70
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
1
/
75
100%