Cédric Bourrasset

Note d’application
Théorie des machines synchrones
Cédric Bourrasset - Projet P10AB04
Amélioration de la partie Electronique d’un système d’éclairage public autonome

Théorie des machines synchrones
Sommaire
1 Introduction 3
2 Technologie des machines synchrones 4
2.1 Types de rotor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2.2 Types de stator . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
3 Champs tournants 6
3.1 Somme de vecteurs temporels et vecteur tournant . . . . . . . . . . . . . . . . 6
3.2 Application aux champs tournants . . . . . . . . . . . . . . . . . . . . . . . . . 7
4 Force magnétomotrice 8
5 Bobinages non réguliers 8
5.1 Bobinage à trous . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
5.2 Bobinages à nombre fractionnaire d’encoches par pôle et par phase . . . . . . 8
6 Les aimants permanents 9
6.1 Définitions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
6.2 Cycle en aimantation M(H)et en induction B(H). . . . . . . . . . . . . . . . 9
6.3 Fonctionnement statique et dynamique d’un aimant permanent . . . . . . . . 10
6.4 Produit énergétique maximum . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
6.5 Paramètres principaux des matériaux à aimants . . . . . . . . . . . . . . . . . 12
6.6 Classification des familles d’aimants . . . . . . . . . . . . . . . . . . . . . . . . 12
7 Atténuation des harmoniques de denture 13
7.1 Problématique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
7.2 Expression de l’angle de vrillage . . . . . . . . . . . . . . . . . . . . . . . . . . 13
7.3 Evolution du coefficient de vrillage . . . . . . . . . . . . . . . . . . . . . . . . . 15
7.4 Conséquences mécaniques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
8 Conclusion 16
Table des figures
1 Présentation des différentes technologies de rotor . . . . . . . . . . . . . . . . 4
2 Etoile des tensions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
3 Bobinage distribué . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
4 Type de bobinages concentriques . . . . . . . . . . . . . . . . . . . . . . . . . . 6
5 Allure de la force magnétomotrice . . . . . . . . . . . . . . . . . . . . . . . . . 8
6 a) Cycle en aimantation et b) Cycle en induction . . . . . . . . . . . . . . . . . 9
7 Courbe de désaimantation d’un matériau idéal . . . . . . . . . . . . . . . . . . 10
8 Déplacement de la droite de charge dans un circuit à géométrie variable . . . 11
9 Déplacement de la droite de charge sous l’effet d’un champ intermittent Hint 11
10 Classification du coût des aimants en fonction de leur produit énergétique . 13
11 Evolution du coefficient de vrillage en fonction des harmoniques . . . . . . . 15
Note d’application - Projet P10AB04 2 Cédric Bourrasset

Théorie des machines synchrones
1 Introduction
Les machines synchrones sont souvent utilisées en générateur, plus communément appelées
alternateurs. On en retrouve dans différents domaines d’application tels que les centrales
nucléaires ou hydroélectriques.
Cette étude porte sur une génératrice développée par l’entreprise Windela afin de fournir en
énergie un système d’éclairage public éolien. La difficulté pour une application de ce type
est de récupérer de la puissance du vent, qui à basse altitude, est rarement constant. Il est
donc difficile de concevoir une génératrice performante pour ce type de fonctionnement.
Nous allons aborder les points importants concernant la technologie des machines syn-
chrones et apporter des solutions afin d’améliorer la génératrice Windela.
Note d’application - Projet P10AB04 3 Cédric Bourrasset

Théorie des machines synchrones
2 Technologie des machines synchrones
Avant d’entrer dans le détail de l’étude des machines synchrones, nous allons abordé la tech-
nologie afin d’avoir une vision précise de ce que l’on va développer au fil de ce document.
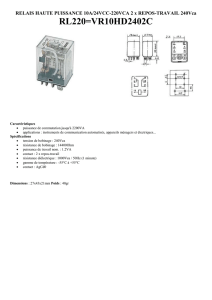
2.1 Types de rotor
La figure 1 présente les différentes géométries possibles pour des rotors.
Figure 1: Présentation des différentes technologies de rotor
Dans la littérature, nous n’avons pas trouvé d’expression mathématique qui nous perme-
ttent de décider du type de rotor. Ce choix repose essentiellement sur le type d’application
et l’expérience de la personne qui conçoit la machine. La différence entre les deux machines
se fait essentiellement au niveau de l’entrefer. Une machine à pôles lisses a un entrefer con-
sidéré comme constant alors qu’une machine à pôles saillants a un entrefer variable. On
retrouve des machines synchrones à pôles lisses dans les applications où la vitesse de rota-
tion est élevée et les machines à pôles saillants interviennent sur des applications de faible
vitesse, avec des puissances plus importantes.
Le type de rotor implique le choix du modèle équivalent de la machine. On retrouve le
modèle de Potier pour les machines à pôles lisses et le modèle de Blondel pour les machines
à pôles saillants.
Note d’application - Projet P10AB04 4 Cédric Bourrasset

Théorie des machines synchrones
2.2 Types de stator
Le bobinage d’une machine synchrone est un des points cruciaux de la conception pour
l’obtention de bonnes performances. On retrouve deux familles de bobinage, distribué ou
concentrique, mais il est possible de concevoir de nombreuses variantes, seulement limitées
par les problèmes de fabrication. L’article [1] traite de l’influence des différents types de
bobinages sur les performances des machines électriques.
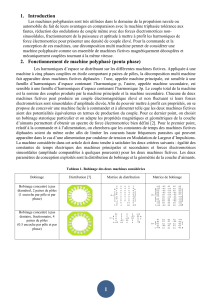
Dans un bobinage distribué, on change de phase à chaque fois que l’on change d’encoche.
Pour l’ordre d’apparition des phases, on choisit de se référer à l’étoile des tensions (figure 2).
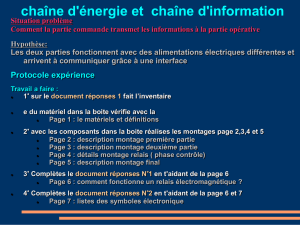
La figure 3 présente un stator avec un bobinage distribué.
Figure 2: Etoile des tensions
Figure 3: Bobinage distribué
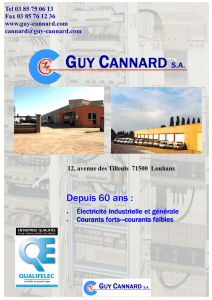
Pour chaque famille, on peut réaliser un bobinage à pas diamétral ou à pas raccourci.
Dans un bobinage à pas diamétral, on dispose dans chaque encoche une seule et unique
phase. Un bobinage à pas raccourci peut contenir plusieurs phases dans une seule encoche.
Ce procédé permet d’avoir une variation de l’induction dans l’entrefer sinusoïdal, ce qui
réduit les pertes magnétiques au niveau du fer et les ondulations de couple mais ce qui im-
pose certaines complexités de fabrication. La figure 4a représente un bobinage concentrique
à pas diamétral et la figure 4b un bobinage concentrique à pas raccourci.
Note d’application - Projet P10AB04 5 Cédric Bourrasset
 6
7
8
9
10
11
12
13
14
15
16
6
7
8
9
10
11
12
13
14
15
16
1
/
16
100%