Chap B.3.2.1

Chapitre B.3.2.1 Moteur à courant continu : principe, réversibilité
L’étude de l’électromagnétisme a mis en évidence, le principe de fonctionnement des
machines à courant continu:
- fonctionnement en moteur, par déplacement d’un conducteur parcouru par un
courant et placé dans un champ magnétique, sous l’action des forces de Laplace.
- fonctionnement en génératrice, par l’apparition d’une f.é.m induite aux
bornes d’un conducteur qui se déplace dans un champ magnétique.
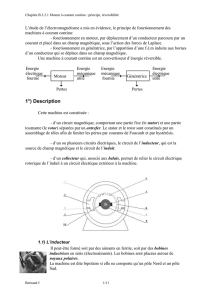
Une machine à courant continu est un convertisseur d’énergie réversible.
Moteu
r
Energie
électrique
fournie
Pertes
Energie
mécanique
utile
Génératrice
Energie
mécanique
fournie
Pertes
Energie
électrique
utile
1°) Description
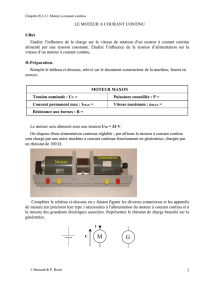
Cette machine est constituée :
- d’un circuit magnétique, comportant une partie fixe (le stator) et une partie
tournante (le rotor) séparées par un entrefer. Le stator et le rotor sont constitués par un
assemblage de tôles afin de limiter les pertes par courants de Foucault et par hystérésis.
- d’un ou plusieurs circuits électriques, le circuit de l’inducteur, qui est la
source de champ magnétique et le circuit de l’induit.
- d’un
collecteur qui, associé aux balais, permet de relier le circuit électrique
rotorique de l’induit à un circuit électrique extérieur à la machine.
1.1) L’inducteur
Il peut-être formé soit par des aimants en ferrite, soit par des bobines
inductrices en série (électroaimants). Les bobines sont placées autour de
noyaux polaires.
La machine est dite bipolaire si elle ne comporte qu’un pôle Nord et un pôle
Sud.
Bernaud J 1/11

Chapitre B.3.2.1 Moteur à courant continu : principe, réversibilité
1.2) L’induit
Il est formé de conducteurs logés dans des encoches.
1.3) Le collecteur et les balais
Le collecteur est un ensemble de lames de cuivre isolées latéralement les unes
des autres, réunies aux conducteurs de l’induit en certains points.
Les balais, portés par le stator, frottent sur les lames du collecteur, et permettent d’établir une
liaison électrique entre l’induit qui tourne et l’extérieur de la machine.
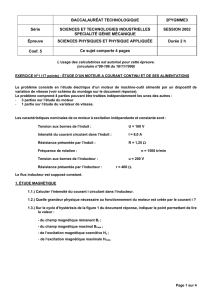
1.4) Le circuit magnétique
Forme des lignes de champ dans le rotor, le stator et l’entrefer:
Forme du champ magnétique dans l’entrefer:
θ (rad)
B(T)
2°) Principe de fonctionnement
2.1) Rappel
Soit un circuit fermé orienté, on détermine la normale à cette surface, en
respectant la règle du tire-bouchon, afin d’algébriser le flux.
Bernaud J 2/11

Chapitre B.3.2.1 Moteur à courant continu : principe, réversibilité
r
n: Vecteur unitaire normale à la surface S
r
r
S
S
n
=
⋅
: Vecteur surface
n
B
(S) ΦΘ=•= × ×
r
r
r
r
BS B S cos
2.2) F.é.m instantanée induite dans une spire
Faisons l’étude avec une machine simplifiée, elle ne possède qu’une paire de
pôles, que deux encoches sur son rotor, dans lesquelles sont logés deux conducteurs, réunis
pour former une spire et que deux lames de collecteur. Voir animation http://lyc-renaudeau-
49.ac-nantes.fr/physap/spip.php?article295
Nous supposons que la vitesse angulaire du rotor est constante et égale à
Ω
.
L’origine des temps est choisie de manière à avoir
Θ
= 0 pour t = 0s, dans ces conditions
Θ=Ω .
t. On admettra, que le flux embrassé par une spire est une fonction sinusoïdale de
Θ
,
cela suppose que la composante radiale du champ magnétique dans l’entrefer varie
sinusoïdalement avec
Θ
, ce qui n’est pas exactement le cas.
Pour
Θ
=0, le flux est maximal,
(
)()
ϕ
ϕ
ϕ
=
×
=
×
×
$cos $cos
Θ
Ω
t
La spire est le siège d’une f.é.m induite
()
e
t
t
s=− = × × ×
d
d
ϕ
ϕ
$sin
ΩΩ
2.3) F.é.m de la machine simplifiée
Bernaud J 3/11

Chapitre B.3.2.1 Moteur à courant continu : principe, réversibilité
Rôle du collecteur:
Si le balai A est sur la lame C et le balai B sur la lame D, alors
emachine = uAB = vC-vD = es =e1+e2
Si le balai A est sur la lame D et le balai B sur la lame C, alors
emachine = uAB= vD-vC = -es = - (e1+e2)
L’ensemble (balai, collecteur) assure une fonction de redressement, par conséquent la valeur
moyenne de la f.é.m de la machine simplifiée est:
emachine =××2$
ϕ
π
Ω
2.4) Généralisation
En conclusion, la f.é.m de la machine est moins ondulée et sa valeur moyenne
est plus grande.
On appelle voie d’enroulement, l’ensemble des conducteurs parcourus pour
aller d’un balai à un autre.
Pour une machine réelle, on a N conducteurs logés dans les encoches de
l’induit, qui sont réparties sur tout le pourtour de l’entrefer en a paires de voies d’enroulement
entre les balais (donc elles constituent 2a branches parallèles). A chaque instant, chacune de
ces branches met en série N/(2a) conducteurs, soit N/(4a) spires. Les f.é.m engendrées dans
les N/(4a) spires, sont décalées en fonction de la répartition spatiale de celles-ci. Elles
engendrent entre les balais, une f.é.m résultante presque continue, qui correspond à la somme
des valeurs moyennes des f.é.m engendrées.
Pour une machine bipolaire:
Bernaud J 4/11

Chapitre B.3.2.1 Moteur à courant continu : principe, réversibilité
ENaeNaNa
s
=××=
×
×
×
×
=
×
×
××
44
22
$$
ϕ
π
π
ϕ
Ω
Ω
Pour une machine ayant p paires de pôles:
Ep Na
=×
×
×
××
2
π
ϕ
$
Ω
E
K
=
×
×
Φ
Ω
On utilisera la formule suivante:
E exprimé en V
K constante dépendant de la construction de la machine: Kp Na
=×
××
2
π
Φ
Flux maximal sous un pôle en Wb
Ω
Vitesse de rotation du rotor en rad/s
3°) Couple électromagnétique
Soient deux conducteurs formant une spire parcourue par un courant I. Ceux-ci étant
placés dans un champ magnétique B, ils sont soumis aux forces de Laplace F1 et F2, qui
forment un couple de force.
r
r
r
F
I
l
B
=
×
∧
(
I
l
×
r
,
r
B
,
r
F
) forment un trièdre direct.
On peut appliquer la règle de la main
droite:
I
l
×
r
correspond à l’index,
r
B
.................... au majeur,
r
F
.................... au pouce.
3.1) Expression du moment du couple électromagnétique
Si l’induit présente une f.é.m induite E et s’il est parcouru par un courant I, il
reçoit une puissance électromagnétiquePEI
em
=
×
.
La puissance développée par le couple électromagnétique est:
PT
em
=
×
Ω
D’après le principe de conservation de l’énergie, on a Pem = P.
d’où EIT T EI
em em
×= × ⇔ = ×
Ω
Ω
or
E
K
=
×
×
Φ
Ω
.
Bernaud J 5/11
 6
7
8
9
10
11
6
7
8
9
10
11
1
/
11
100%