Préparation Représentation entrée-sortie

Analyse et commande des systèmes linéaires invariants
TD1 - Modélisation entrée-sortie des SLI - Boucle Fermée
L2 EEA-MK-GC
Préparation
(i) Remplir la Feuille d’assimilation du cours 1.
(ii) Rappeler la structure d’une boucle fermée en faisant apparaître sur un schéma-bloc le système
que l’on souhaite asservir, le correcteur, la chaîne de mesure, la consigne, l’erreur d’asservisse-
ment et la commande.
(iii) Expliquer en quoi la régulation est un cas particulier d’asservissement.
(iv) Rappeler ce qui distingue le correcteur, la loi de commande, et la commande.
(v) Lire et s’avancer sur le TD...
Représentation entrée-sortie
Exercice 1 Régulation du niveau d’eau d’une cuve
On s’intéresse à une cuve dont on veut réguler la hauteur d’eau. Cette cuve est alimentée en eau
par un robinet dont le débit est réglable, et elle présente par ailleurs un débit de fuite (dont la section
est constante).
1. Quelle seront l’entrée et la sortie de ce système ?
2. De quelle mesure devra-t-on disposer pour mettre en place une boucle fermée ?
3. Représenter la mise en place d’une boucle fermée par un schéma-bloc, en faisant apparaître le
signaux importants avec leur unité physique.
Exercice 2 Chauffage d’une maison
Une maison dispose d’un système de chauffage de puissance réglable. Pour pallier les pertes de
chaleur (toits, murs, etc.), on souhaite mettre en place un système de régulation de la température
à l’intérieur de la maison.
1. Quelle sont l’entrée et la sortie de ce système ?
2. Représenter par un schéma-bloc la mise en place d’une boucle fermée sur ce système.
Exercice 3 Cap d’un bateau
On souhaite équiper un voilier d’un système d’asservissement de son cap (noté α), sachant que
le bateau dispose de l’équipement nécessaire pour connaître son cap en temps réel.
1

Nord
cap α
1. Quelle partie du bateau permet de modifier son cap ? Par quelle quantité mathématique peut-on
par exemple la représenter ?
2. Quelles sont alors l’entrée et la sortie du bateau dans le cadre cet asservissement ?
3. Représenter par un schéma-bloc la mise en place d’une boucle fermée sur ce système.
Modèles différentiels entrée-sortie de SLI
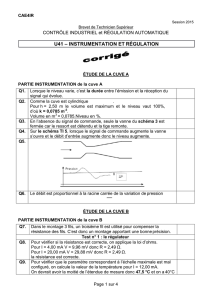
Exercice 4 Moteur à courant continu
On souhaite asservir la vitesse de rotation de l’axe d’un moteur à courant continu (MCC), visible
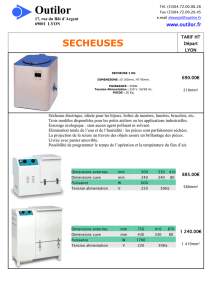
en Figure 1. De manière simplifiée, un MCC est composé d’un inducteur (ou stator, modélisé par une
résistance R, une self Let un générateur E) parcouru par un courant d’intensité iet dont la tension
à ses bornes est réglable et notée u(t). Cet inducteur communique à l’arbre moteur un couple Γm.
L’arbre moteur, d’inertie J, est dans sa rotation soumis à des frottements visqueux proportionnels à
sa vitesse de rotation notée ω; ce coefficient de proportionnalité (de frottements visqueux) est noté ν.
L
R
E
u(t)
i(t)
Stator Rotor
ω(t)
J
Figure 1 – Représentation schématique d’un moteur à courant continu.
On donne ci-après les équations (électriques, mécaniques) de chacun des éléments constituant le
2

MCC :
u(t) = E(t) + R i(t) + Ldi(t)
dt ,(equation elec. inducteur) (1)
Jdω(t)
dt = Γ(t)−ν ω(t),(PFD) (2)
E(t) = k ω(t),(vitesse de rotation prop. à la tension c.e.m E),(3)
Γ(t) = kci(t),(couple moteur proportionnel à l’intensité i).(4)
1. Déterminer l’entrée et la sortie à considérer dans le cadre de cet asservissement.
2. En utilisant les équations fournies, établir le modèle différentiel du système à asservir.
3. Ce modèle est-il linéaire et invariant ?
Exercice 5 Régulation du niveau d’eau d’une cuve (suite)
Pour établir un modèle entrée-sortie (différentiel) de la cuve qui soit compatible avec le cadre de
ce cours (SLI), on admettra dès à présent la nécessité de se placer sur le régime d’équilibre de la cuve
correspondant à la hauteur d’eau autour de laquelle on souhaite évoluer.
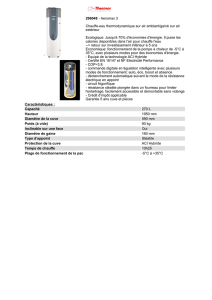
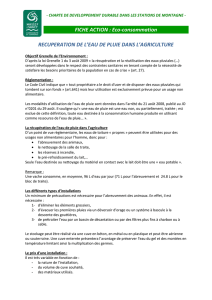
Tout revient alors à considérer le problème d’une cuve initialement vide, dont les débits qeet qset
la hauteur hsont en réalité des variations de débits et de hauteur par rapport à ce régime d’équilibre
auquel tout se rapporte implicitement sans qu’il ne soit plus nécessaire de s’en préoccuper 1. Le
système tel qu’on le considère est donc celui représenté en Figure 2.
qe(t)
h(t)
S
qs(t)
Figure 2 – Cuve d’eau.
Dans ces conditions, on peut considérer en première approximation que le débit de fuite qss’ex-
prime : qs(t) = a h(t), avec aun nombre fixé (dont la valeur dépend entre autres du régime d’équilibre
considéré).
1. Donner l’expression du volume d’eau v(t)dans la cuve en fonction de Set de h(t). Quelle
opération mathématique sur v(t)permet d’exprimer la variation de ce volume au cours du
temps ?
2. Par une considération de conservation de matière (l’eau), établir le modèle différentiel entrée-
sortie de ce système.
3. Ce modèle est-il linéaire et invariant ?
1. Cette méthode, classique en automatique mais hors du programme de ce cours d’introduction, prend habituel-
lement le nom de "linéarisation autour d’un point d’équilibre".
3
1
/
3
100%