M - LPSC

Johann Collot collot@in2p3.fr http://lpsc.in2p3.fr/atlas_new/teachingitem.htm Mécanique L1 et IUT1
Les Forces

Johann Collot collot@in2p3.fr http://lpsc.in2p3.fr/atlas_new/teachingitem.htm Mécanique L1 et IUT1

Johann Collot collot@in2p3.fr http://lpsc.in2p3.fr/atlas_new/teachingitem.htm Mécanique L1 et IUT1

Johann Collot collot@in2p3.fr http://lpsc.in2p3.fr/atlas_new/teachingitem.htm Mécanique L1 et IUT1

Johann Collot collot@in2p3.fr http://lpsc.in2p3.fr/atlas_new/teachingitem.htm Mécanique L1 et IUT1
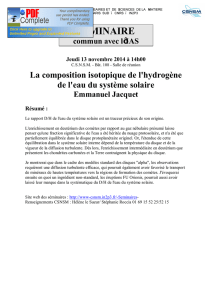
Les forces fondamentales procèdent par
des interactions à distance
Newton : «Que la gravité soit infuse, inhérente et essentielle à la matière, de telle
façon qu'un corps agisse à distance sur un autre à travers le vide , sans intervention
d'un facteur qui acheminerait les forces et leur action d'un corps à l'autre, tout cela
me paraît d'une telle absurdité qu'à mon sens, aucun homme capable de réfléchir en
philosophe ne pourra s'y laisser prendre .»
e-
e-
p+
p+
Interaction
entre un
électron et un
proton dans un
atome d'hydrogène
échange d'un
photon
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
6
7
8
9
10
11
12
13
14
15
16
17
18
19
1
/
19
100%