CHAPITRE 13 : MODÉLISATION

CHAPITRE 13 :
MODÉLISATION
MODÉLISATION ............................................................................................................ 181
I
NTRODUCTION
................................................................................................................. 182
R
EVUE DES ÉQUATIONS MÉCANIQUES
............................................................................... 182
Translation ................................................................................................................... 182
Rotation ........................................................................................................................ 184
Engrenages .................................................................................................................. 186
A
CTIONNEURS
.................................................................................................................. 187
Moteur DC à contrôle d’induit .................................................................................... 187
Rappels des lois électromagnétiques ........................................................................ 187
Le moteur .................................................................................................................. 188
Le moteur avec des engrenages et une charge .......................................................... 200
Vanne pneumatique ...................................................................................................... 201
C
APTEURS
........................................................................................................................ 203
Potentiomètre ............................................................................................................... 203
Tachymètre ................................................................................................................... 204
Filtrage des mesures .................................................................................................... 205

Chapitre 13 Modélisation
Systèmes et commande linéaires GEL-2005 182
I
NTRODUCTION
À l’aide d’une fonction de transfert, il est possible de représenter le comportement
dynamique d’un procédé. Il est donc possible de calculer sa sortie si on connaît l’entrée et
les conditions initiales. Cette fonction de transfert est un modèle mathématique du procédé
et elle peut être obtenue par identification ou par modélisation.
L’identification consiste à déterminer un modèle dynamique d’un procédé à partir de
données expérimentales (données entrée-sortie).
La modélisation consiste à dériver un modèle dynamique du procédé en se basant sur les
lois de la physique.
R
EVUE DES ÉQUATIONS MÉCANIQUES
Cette section donne une rapide revue de l’écriture des équations qui décrivent le
comportement de systèmes mécaniques simples.
Translation
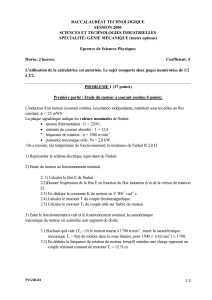
La figure 13.1 montre une masse M (kg) dont on veut étudier le déplacement linéaire x (m).
La masse est attachée à un mur fixe par un ressort ayant une constante de rappel K
r
. La
masse se déplace sur une surface offrant une friction caractérisée par la constante K
f
. De
plus, on applique une force F (N) sur la masse.
Figure 13.1
L’analyse de ce système est réalisée en se basant sur la loi de Newton qui dit que la somme
des forces agissant sur une masse est égale à la masse de celle-ci multipliée par son
accélération linéaire.
Quels sont les forces agissant sur la masse ?
1. Il y a évidemment la force F qu’on applique.

Chapitre 13 Modélisation
Systèmes et commande linéaires GEL-2005 183
2. Le frottement de la masse M qui est en contact avec la surface sur laquelle elle se
déplace est supposé proportionnel à la vitesse de déplacement (on qualifie alors ce
frottement de visqueux; la relation de proportionnalité avec la vitesse n’est valide que
pour les faibles vitesses):
F K dx
dt
f f
= −
Le signe négatif indique que la force agit dans la direction opposée à la vitesse.
3. Le ressort agit également sur le déplacement de la masse. La ressort est défini par sa
raideur
K
r
(constante de rappel). L’étirement (ou la compression) du ressort est
x
-
x
0
,
où
x
0
est la position de la masse telle que le ressort est au repos (ni étiré, ni compressé).
La force créée par le ressort sur la masse est la suivante:
F K x x
r r
=
−
−
( )
0
Le signe négatif indique que si le ressort est étiré (x > x
0
) alors la force agit dans le sens
contraire au déplacement x (vers les x négatifs). Si au contraire, le ressort est comprimé
(x < x
0
), la force est positive et agit dans le sens du déplacement x. Si le ressort est au
repos (x = x
0
), la force sur la masse est nulle.
L’utilisation de la loi de Newton permet l’écriture définissant le système:
forces masse accélération
∑
= ×
− − − =
F K dx
dt
K x x M d x
dt
f r
( )
0
2
2
Connaissant les forces qui agissent sur un système, on peut calculer l’énergie ou le travail
effectué:
(
)
E
Md x
dt
x
= ×
= ⋅
∑
forces déplacement
2
2
Le travail E s’exprime en J (joules). Un joule est un N·m.
La puissance fournie au système est:
(
)
P forces vitesse
Md x
dt
dx
dt
=
= ⋅
∑
2
2

Chapitre 13 Modélisation
Systèmes et commande linéaires GEL-2005 184
La puissance P s’exprime en W (watts). Un watt est un J/s ou encore un N·m/s.
Rotation
Un système en rotation est décrit par une équation très similaire à un système en translation.
On y remplace simplement les forces par des couples, les masses par des moments d’inertie
et les déplacements linéaires par des déplacements angulaires.
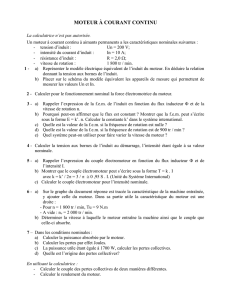
La figure 13.2 montre une masse M dont on veut étudier le déplacement angulaire
θ
(rad).
La masse possède un moment d’inertie J (kg·m
2
) (le moment d’inertie d’un cylindre plein
de rayon R et de masse M est ½MR
2
). Le mouvement de rotation de la masse dépend d’un
ressort circulaire ayant une constante de rappel K
r
. La masse tourne contre une surface
offrant une friction caractérisée par la constante K
f
. De plus, on applique un couple T
(N·m) sur la masse.
Figure 13.2
L’analyse de ce système est réalisée en se basant sur la loi de Newton qui dit que la somme
des couples agissant sur une masse est égale à l’inertie de celle-ci multipliée par son
accélération angulaire.
Quels sont les couples agissant sur la masse ?
1.
Il y a évidemment le couple T qu’on applique.
2.
Le frottement de la masse M qui est en contact avec la surface sur laquelle elle se
déplace est supposé proportionnel à la vitesse angulaire (valide que pour les faibles
vitesses):
T K d
dt
f f
= −
θ
Le signe négatif indique que la force agit dans la direction opposée à la vitesse.
3.
Le ressort agit également sur le déplacement de la masse. La ressort est défini par sa
raideur K
r
. L’ « étirement » (ou la « compression ») du ressort est
θ
-
θ
0
, où
θ
0
est la

Chapitre 13 Modélisation
Systèmes et commande linéaires GEL-2005 185
position angulaire de la masse telle que le ressort est au repos. Le couple créé par le
ressort sur la masse est la suivante:
T K
r r
=
−
−
( )
θ
θ
0
Le signe négatif indique que si le ressort est étiré (
θ
>
θ
0
) alors le couple agit dans le
sens contraire au déplacement
θ
(vers les
θ
négatifs). Si au contraire, le ressort est
comprimé (
θ
<
θ
0
), le couple est positif et agit dans le sens du déplacement
θ
. Si le
ressort est au repos (
θ
=
θ
0
), le couple sur la masse est nul.
L’utilisation de la loi de Newton permet l’écriture définissant le système:
couples inertie accélération
∑
= ×
− − − =
T K d
dt
K J d
dt
f r
θθ θ θ
( )
0
2
2
Connaissant les couples qui agissent sur un système, on peut calculer l’énergie ou le travail
effectué:
(
)
E
Jd
dt
= ×
= ⋅
∑
couples déplacement
2
2
θθ
Bien entendu, le travail E s’exprime encore (et toujours!) en joules.
La puissance fournie au système est:
(
)
P
Jd
dt
d
dt
= ×
= ⋅
∑
couples vitesse
2
2
θ θ
La puissance P s’exprime en watts.
__________________________________
E
XEMPLE
13.1
Le système étudié est illustré à la figure 13.2. Si on considère qu’il n’y a pas de ressort, que
l’entrée de ce système est le couple T et que la sortie est le déplacement angulaire
θ
, alors
quelle est la fonction de transfert du système ?
Selon la loi de Newton:
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
1
/
27
100%