Acoustique : Propagation et célérité des ondes

20 kHz
ω
k= 1/2πL
ω=cωk,
cω=sE
ρ,
E ρ
cω=r1
ρχ,
χ=−1
V∂V
∂P
cg
1.5MHz 250 kHz

1500 m/s
1cm 4cm
•1.5MHz 10 V
•1.5MHz 10 V
•250 kHz 10 V
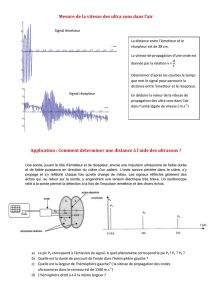
-1
-0.5
0
0.5
1
0 50 100 150 200 250
signal (unité arbitraire)
t (unité arbitraire)
1.5MHz

1.5MHz
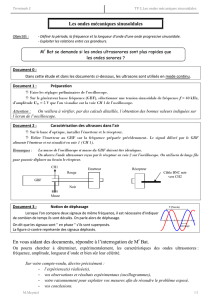
τ1=Ltotale/ceau τ2=Leau/ceau +Lbloc/cbloc
∆τ=τ1−τ2

v
ω0
ω=ω0(1 + v/c)v
e(t)r(t)
ω0s(t)e(t)×r(t)
ω0e(t)
e(t)ω ω0s(t)ω−ω0e(t)
s(t)ω0
ω−ω0

•λ=
•λ1.5MHz =
•λ250kHz =
•
•
•
•c=
•
•∆c/c =
•c=
•
•∆c/c =
•c=
•cP MMA =
•cmetal =
•c=
•cP MMA =
•cmetal =
•
 6
7
6
7
1
/
7
100%