Note d`application 1 : Analyse particulaire

Note d’application
Analyse particulaire
Jean-Patrick WANNER – GE3
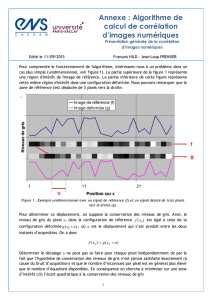
Etude d’un des algorithmes implanté dans le VI particle analysis report de Labview.
Projet GE3 P11A05

Jean-Patrick WANNER | Analyse particulaire
1
Sommaire
Introduction ............................................................................................................................................. 2
Rappel sur la connectivité ....................................................................................................................... 2
Présentation du bloc Labview particle analysis report ........................................................................... 3
Recherche des algorithmes ..................................................................................................................... 4
Fonctionnement du VI ......................................................................................................................... 4
L’algorithme Moore - Neighbor Tracing .............................................................................................. 5
L’algorithme du Square-Tracing .......................................................................................................... 7
Discussion ............................................................................................................................................ 7
Dimensionnement d’une particule...................................................................................................... 8
Conclusion ............................................................................................................................................... 9

Jean-Patrick WANNER | Analyse particulaire
2
Introduction
Les algorithmes de comptage et de mesure implantés dans notre programme Labview ont besoin de
détecter les poissons sur chaque image. Plus précisément, il faut détecter tous les poissons sur
l’image (en prenant en compte toutes les formes) et connaitre le nombre de pixels qu’occupent ces
poissons (particules) afin de calculer leur taille.
Le bloc particle analysis report de NI Vision pour Labview donne ces informations et répond à notre
demande. Ce bloc (ou Visual Instrument VI) a donc été utilisé dans nos algorithmes. Mais étant fourni
par Labview, il est impossible de connaître les algorithmes qu’il contient.
Ce rapport présente le résultat des recherches concernant les algorithmes qui semblent être utilisés
dans ce bloc pour identifier les particules sur l’image. Il n’est donc pas certain que les algorithmes
présentés soient effectivement ceux implantés dans le bloc. Un parallèle entre le résultat obtenu
avec le bloc de Labview et le résultat que peut fournir un algorithme de traitement d’images est aussi
effectué.
Rappel sur la connectivité
Sur les images binaires, les pixels sont soit noirs (valeur = 0), soit blancs (= 255). Afin d'identifier des
objets dans une image binaire, nous avons besoin de localiser des pixels blancs qui sont «connectés»
les uns aux autres. En d'autres termes, les pixels connexes, ou voisins, forment un objet sur une
image binaire qu’il faut réussir à identifier.
Quand pouvons-nous dire que deux pixels sont voisins ?
Puisque nous utilisons des pixels carrés, la réponse à la question précédente n'est pas triviale. La
raison à cela est la suivante : dans un pavage carré, les pixels partagent soit une arête, soit un
sommet, soit rien. En fait, un pixel peut être en contact avec 8 pixels, liés par une arête ou un
sommet. Ces pixels définissent le voisinage de Moore. Ce type de connectivité s’appelle la
connectivité 8. Dans le cas où les pixels ne sont liés que par les arêtes, la connectivité est de type 4.
Avec la connectivité 4, les pixels voisins du pixel P sont représentés comme ceci :
Les pixels voisins de P sont ceux ayant une arête commune avec lui.

Jean-Patrick WANNER | Analyse particulaire
3
Avec la connectivité 8 (aussi appelée le voisinage de Moore), les pixels voisins d’un pixel P sont
représentés comme ceci :
Les pixels voisins de P sont en contact avec ce dernier via leurs arêtes ou via leurs sommets.
Présentation du bloc Labview particle analysis report
Sur le diagramme de Labview, le bloc est présenté comme ceci :
Le bloc retourne le nombre de particules détectées dans une image binaire et un tableau contenant
des informations sur les particules le plus couramment utilisées. Ces informations sont par exemple
la surface qu’occupe une particule sur l’image, le nombre de trous dans cette particule ou encore la
dimension (X, Y) de la particule.
Les entrées
-Connectivity 4/8 (8) : cette entrée est par défaut à 8 (TRUE), elle spécifie le type de connectivité
utilisée par l'algorithme pour la détection des particules. Le mode de connectivité détermine
directement si un pixel adjacent appartient à la même particule ou à une particule différente.
Autrement dit, sur une même image, le nombre de particules peut être plus ou moins important en
fonction de la connectivité utilisée.
-Image : correspond à la référence de l’image source.
-erreur in : décrit l'état d'erreur avant que ce VI ou cette fonction fonctionne.
Les sorties
-Number of particules : indique le nombre de particules détectées sur une image.
-Image out : cette sortie est la référence de l’image source, elle est utilisée dans le cas où le prochain
VI a besoin de l’image.
-Particle report (Pixels) : est un tableau qui renvoie un ensemble de mesures en pixels non calibrés à
partir des particules détectées. Ce cluster contient les éléments suivants:
Area : est la surface en pixels qu’occupe la particule,
Number of Holes : est le nombre de trous dans la particule,

Jean-Patrick WANNER | Analyse particulaire
4
Bounding Rect : est le plus petit rectangle avec ses côtés parallèles à l'axe des x et des y, qui
encadre complètement la particule,
Center of Mass : est le point qui représente la position moyenne de la masse totale de la
particule. En supposant que chaque point de la particule a une densité constante, la masse m
de chaque pixel constituant la particule est identique. Il s’agit tout simplement du barycentre
de la particule,
L'orientation : est l'angle de la droite qui passe par le barycentre avec le moment d'inertie le
plus faible,
Dimensions : indique (en nombre de pixels) la hauteur et la largeur de la particule.
-Particule report(Real-World) : est un tableau qui renvoie un ensemble de mesures calibrées dans le
monde réel à partir des particules détectées. Le cluster est identique à celui du Particle report
(Pixels). Si l'image n'a pas d'informations de calibrage, les valeurs sont les mêmes que la sortie
Particle report (Pixels).
-Error out : contient les informations d’erreurs liées au VI.
-Calibration Valid : indique si les informations d'étalonnage pour une particule sont valides pour
chaque résultat du Particle report (Real-World).
Recherche des algorithmes
Ce VI retourne de nombreuses informations sur l’image (nombre de trous dans une particule, centre
de masse…) et utilise pour cela plus qu’un algorithme (holes searching, contour tracing…). Les
informations que nous utilisons pour nos algorithmes de mesure et de comptage sont le nombre de
particules trouvées sur une image ainsi que les dimensions (largeur et hauteur) de la particule. Ma
recherche se concentre donc sur les algorithmes qui permettent de détecter les particules sur une
image et de connaitre leur dimension.
Fonctionnement du VI
La première particule détectée par le VI est toujours celle située la plus à gauche en bas de l’image.
La dernière est la particule la plus à droite en haut de l’image. Sur une image binaire, l’ordre est donc
le suivant :
 6
7
8
9
10
6
7
8
9
10
1
/
10
100%