V= p.ω 2π F=η C.2π p

TRANSMISSIONS DE PUISSANCE & TRANSFORMATEURS DE MOUVEMENT
Système vis-écrou
Fiche de formalisation
Fiche de formalisation
TP51
Nom : ……………………………………………. Prénom : ……………………………………………………. Page 1/1
Généralités
Un système vis/écrou permet de transformer un mouvement de rotation en un mouvement de
translation ou inversement
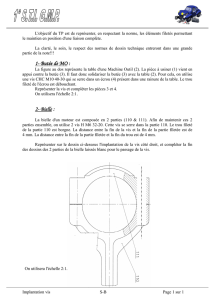
Il existe plusieurs configurations de vis écrou,
la plus courante est la vis motrice (schéma
cinématique ci contre).
(Placez le moteur
M
sur le dessin, le bâti
et précisez quels sont les éléments vis et écrou)
Vocabulaire
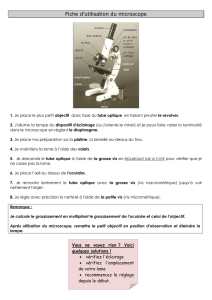
Une vis est définie par :
le diamètre d, son pas p, la pente ß et le sens de l'hélice (droite ou
gauche) et la forme de son profil
Caractéristiques d'un système vis-écrou
M
Relation entre la rotation angulaire de la vis et le déplacement de l’écrou ::
avec d le déplacement en mètre, p le pas de la vis en mètre et θ l’angle en
radian
Relation entre les vitesses :
avec V la vitesse de déplacement en m/s, p le pas de la vis en mètre et ω la
vitesse angulaire en rad/s
Relation entre la force et le couple :
avec F la force en N, C le couple en Nm, p le pas de la vis en mètre et η
le rendementdu mécanisme
d=p.
2
V=p.
2
F= C.2
p
1
/
1
100%