Compléter le tableau suivant

Page 1 sur 6
DS TS2 Génie électrique
Antenne METRONIC
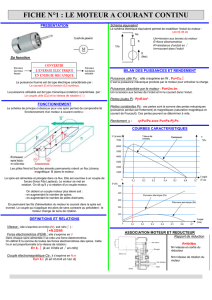
La liaison entre le rotor et le boîtier démodulateur est constituée de 3 fils :
- une alimentation en puissance pour le moteur (2 fils),
- une sortie capteur qui fournit les impulsions relatives au mouvement de la parabole (1 fil).
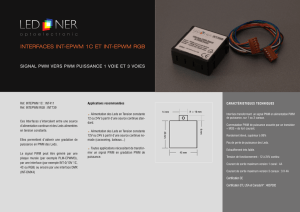
Le principe de l’interface moteur est donné ci dessous :
Principe de l’interface moteur
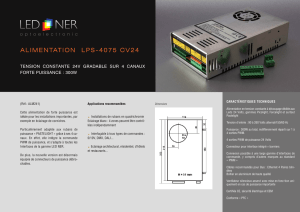
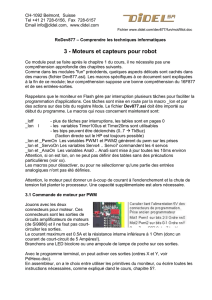
1- Identifier cette fonction sur le schéma structurel de la carte microcontrôleur donné en
annexe. Voir schéma
Les points A et B correspondent à la tension d’alimentation du moteur (+24V).
2- Si PC0 est à « 0 » et PC1 à « 0 » préciser l’état des transistors Q3 et Q4 (Bloqué ou
saturé). En déduire l’état des relais U3, U4 (travail ou repos), de la LED jaune (allumée
ou éteinte) et de la LED verte. En déduire la valeur du courant I (I=0, I>0 ou I<0).
PC0 à « 0 »
Q3 bloqué
U3 au repos
LED verte éteinte.
PC1 à « 0 »
Q4 bloqué
U4 au repos
LED jaune éteinte.
I=0
3- Compléter le tableau suivant :
PC0
PC1
Q3
Q4
U3
U4
LED jaune
LED verte
I
0
1
bloqué
saturé
repos
travail
allumée
éteinte
<0
1
0
Saturé
bloqué
Travail
repos
Eteinte
allumée
>0
1
1
saturé
saturé
travail
travail
allumée
Allumée
=0
M
I
SW1
SW2

Page 2 sur 6
Annexe
TxD1
+5V
PT11
C6
100n
B
0V
0V
D11
d1n4001
J2
DB9F-B
1
2
3
4
5
6
7
8
9
+
C3
220uF
PC0
PC1
PA1
PA0
0V
Radiateur WA 400-9P
0V
0V
C12
100n
D3
d1n4001
R16
13K
PT10
0V
0V
RESET
D10
d1n4001
S3 R20
3.3K
R22
1k
+5V
Rotation Gauche
+5V
0V
RESET
PT2
RXD
U6
at90
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20 21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
(T0)PB0
(T1)PB1
(AIN0)PB2
(AIN1)PB3
(SS/)PB4
(MOSI)PB5
(MISO)PB6
(SCK)PB7
RESET/
VCC
GND
XTAL2
XTAL1
(RXD)PD0
(TXD)PD1
(INT0)PD2
(INT1)PD3
(OC1B)PD4
(OC1A)PD5
(ICP)PD6 PD7(OC2)
PC0
PC1
PC2
PC3
PC4
PC5
PC6(TOSC1)
PC7(TOSC2)
AVCC
AGND
AREF
PA7(ADC7)
PA6(ADC6)
PA5(ADC5)
PA4(ADC4)
PA3(ADC3)
PA2(ADC2)
PA1(ADC1)
PA0(ADC0)
R21
330
C22
100n
R38
10k
R11
10K
0V
+24V
R7
56K
U2
SP232
10
11
8
13
1
3
4
5
2
6
9
12
7
14
T2IN
T1IN
R2IN
R1IN
C1+
C1-
C2+
C2-
V+
V-
R2OUT
R1OUT
T2OUT
T1OUT
D8 R12
10K
0V
+
C1
10uF
PA2
Droite
D5
RxD1
1 1
Vaucanson 1 rue de védrines 37081 TOURS
Revision:
10 / 02 / 00
Page of
2.0
Date :
Auteur :
PT4
PA2
Led Rouge
D9
PC0
TXD
R1 330
+
-
F
O
U4 relais
1
2
3
5
7
8
6
4
U7A
LM324
3
2
4
11
1
+
-
V+
V-
OUT
TXD
R14
1meg
+5V
+
C19
10uF
Led Jaune
RXD
C5
100n
Q2
Q2N2222
R4
1k
+24V
S2
PC1
0V
PT5
PA3
Init
+
-
F
O
U3 relais
1
2
3
5
7
8
6
4
C13
100n
R26
18K
B
0V
+5V
R13
10K
D1
1
PA3
0V
R3
1k
50V
S1
0V
R5
1k
R15
11K
+5V
C11
100n
C4
100n
PA1
Memo
+5V
+
C16
10uF
+5V
R9
10K
D2
1
C7
100n Q4
Q2N2222
PA4
PT1
0V
Rotation Droite
INT0
+
C18
10uF
Q3
Q2N2222
0V
0V
S4
R8
56K
R19
330
U7B LM324
5
6
411
7
+
-
V+ V-
OUT
Gauche
PT16
C9 33n
C14
22p
INT0
+5V
0V
+5V
+5V
0V
+5V
0V
0V
0V
C2
100n
C20
100n
Antenne Parabolique
PA4
Led Verte
0V
C8
100n
C15
22p
+
C17
10uF
$G_DGND
+5V
R18
3.3K
PT9
U14
DIN3ptF
1
2
3
1
2
3
R17
10K
X1
1MegHz
R6
56K
+5V
A
50V
Q1
Q2N2222
C21
100n
0V
+5V
+24V
PA0
0V
Alim 24V Continu
U7C
LM324
10
9
4
11
8
+
-
V+
V-
OUT
+5V
+5V
$G_DPWR
0V
R2
1k
A
U1lm7805c
1 3
2
IN OUT
GND
R10
10K
16V +5V
PT3
C10
10n
Capteur

Page 3 sur 6
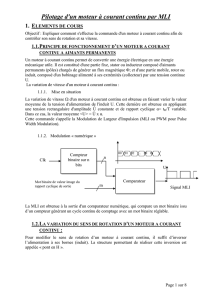
Soit le programme de la parabole ci-dessous :
4- Compléter l’organigramme de ce programme.
Algorithme Organigramme

Page 4 sur 6
Réglage du timer de la commande MLI du moteur CC
1. On désire utiliser la fonction PWM du timer (10 bits). Préciser l’état des bits1 et 0 du registre de
commande TCCR1A.
TCCR1A :1er registre de contrôle du timer 1.
PWM11 = 1 PWM10 = 1 PWM 10 bit
Compléter le tableau suivant :
2. Quel est la valeur maximale et minimale du compteur TCNT1.
TCNT1max=1023, TCNT1min=0
3. En déduire la valeur de la fréquence du signal PWM. (fréquence de l’horloge du système STK200 à 4
MHz). Compléter le document réponse 4 (valeur de CLK).
Fréquence de l’horloge du signal MLI = (4 000 000)/2046 = 1955Hz
4. On utilise la sortie OC1B du microcontrôleur (µC). Sur quel port et quel bit se trouve cette sortie (voir
schéma du STK200).
La sortie de OC1B est sur PD4
5. La sortie OC1B du µC est en mode PWM normale. On n’utilise pas OC1A du µC. Indiquer l’état des
bits 4 à 7 du registre TCCR1A.
COM1X1
COM1X0
Type de PWM
0
0
PWM non active
0
1
PWM non active
1
0
PWM normale
1
1
PWM complémentée
On travaille sur OC1B
COM1A1 = 0 COM1A0 = 1 PWM désactivée
COM1B1 = 1 COM1B0 = 0 PWM normale sur OC1B
Compléter le tableau suivant :
6. En déduire la valeur hexadécimale du registre TCCR1A.
Bit2 e 3 à 0 TCCR1A = 63h
Adresse
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
$2F ($4F)
COM1A1
COM1A0
COM1B1
COM1B0
-------
--------
PWM11
1
PWM10
1
Adresse
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
$2F ($4F)
COM1A1
0
COM1A0
1
COM1B1
1
COM1B0
0
-------
--------
PWM11
1
PWM10
1
PWM11
PWM10
Mode de fonctionnement du timer1
0
0
Mode normal (Non PWM)
0
1
PWM 8 bits
1
0
PWM 9 bits
1
1
PWM 10 bits
Résolution PWM
Valeur maxi compteur
Fréquence
8 bits
$00FF (255)
FTCK1/510
9 bits
$01FF (511)
FTCK1/1022
10 bits
$03FF (1023)
FTCK1/2046

Page 5 sur 6
7. L’alimentation du moteur est fixée à 24V.
La vitesse du moteur est à 2610 tr/min lorsqu’il est alimenté sous 24V.
le rapport cyclique de la MLI est α=0.25.
En déduire la vitesse de rotation du moteur.
ω=2610*0.25= 652,5 tr/min
Sécateur infaco
Le schéma électronique de l’interface de puissance est donné ci-dessous.
1. Dans quel état doit être l’état des transistors Q2 et Q4 pour mettre en marche le moteur ?
Q2 bloqué et Q4 saturé
 6
6
1
/
6
100%