7. Résolution d`équations différentielles du

Fabrice Sincère http://pagesperso-orange.fr/fabrice.sincere/ page 1/10
S
YSTEME DU DEUXIEME ORDRE
R
ESOLUTION D
’
EQUATIONS DIFFERENTIELLES
DU DEUXIEME ORDRE A COEFFICIENTS CONSTANTS
A
PPLICATION EN SCIENCES PHYSIQUES
V
ERSION
1.0.8
I- Equations différentielles du second ordre à coefficients constants
On s’intéresse aux équations différentielles du 2
ème
ordre du type :
∞
=+⋅
ω
+⋅
ωg)t(g
dt )t(dgm2
dt
)t(gd1
0
2
2
2
0
On suppose le système initialement au repos :
=
===
0
dt )0t(dg
0)0t(g
g(t) est une fonction d’une variable t
En pratique, g représente une grandeur physique (tension électrique, vitesse,
température …).
t désigne le temps (en seconde).
g ou (t)g'ou
dt
dg(t) &est la dérivée de la fonction g par rapport à la variable t
g ou (t)'g'ou
dt
g(t)d
2
2
&& est la dérivée deuxième de la fonction g par rapport à la variable t
m est le coefficient d’amortissement du système (sans unité) ; m > 0 pour un système
stable
ω
0
est la pulsation propre du système (en radians par seconde)
π
ω
=
2
f
0
0
est la fréquence propre du système (en hertz)
g
∞
est une constante : elle correspond à la valeur finale g(t
→
∞
)
Ce type d’équation est très courant en sciences physiques : il caractérise les « systèmes du 2
ème
ordre ».

Fabrice Sincère
http://pagesperso-orange.fr/fabrice.sincere/
page 2/10
I-1- Résolution
Equation caractéristique :
01r
m2
²r
1
0
2
0
=+
ω
+
ω
Discriminant :
2
0
2
2
0
2
0
)1m(44m2 ω−
=
ω
−
ω
=∆
I-1-1- Premier cas :
∆
∆∆
∆
> 0
m > 1 ou bien m < -1
Racines de l’équation caractéristique :
()
( )
−−−ω=
−+−ω=
ω
ω−
+
ω
−
=
ω
∆+
ω
−
=
1mmr
1mm
2
1m2m2
2
m2
r
2
02
2
0
2
0
0
2
0
2
0
0
1
Solution générale de l’équation différentielle :
∞
⋅⋅
+⋅+⋅= geBeAg(t)
trtr
21
m > 1 ⇒ r
1
< 0 et r
2
< 0 ⇒ système stable (régime apériodique)
m < -1 ⇒ r
1
> 0 et r
2
> 0 ⇒ système instable
A et B sont deux constantes qui dépendent des conditions initiales :
−
=
−
−=
⇒
=⋅+⋅ =++
⇒
=
===
∞
∞
∞
12
1
12
2
21
rr r
gB
rr r
gA
0rBrA
0gBA
0
dt )0t(dg
0)0t(g
En définitive :
∞
⋅
∞
⋅
∞
+⋅
−
+⋅
−
−=
ge
rr r
ge
rr r
gg(t)
tr
12
1
tr
12
2
21
−⋅−⋅
−=
⋅⋅
∞12
tr
1
tr
2
rr erer
1g)t(g
21
−⋅−+−−⋅−−−
+=
⋅−−−ω⋅−+−ω
∞
1m2
e)1mm(e)1mm(
1g)t(g
2
t)1mm(
2
t)1mm(
2
2
0
2
0
(valable pour m > 1 ou bien m < -1)

Fabrice Sincère
http://pagesperso-orange.fr/fabrice.sincere/
page 3/10
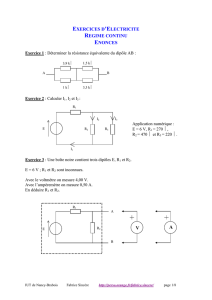
Réponse indicielle d'un système du 2ème ordre
Régime apériodique (m > 1)
0
0,2
0,4
0,6
0,8
1
1,2
0 0,001 0,002 0,003 0,004
temps (s)
m = 2
m = 1,2
(ω
0
= 2π × 1000 rad/s)
N.B. On parle de « réponse indicielle » ou « réponse unitaire » quand la valeur finale est 1.
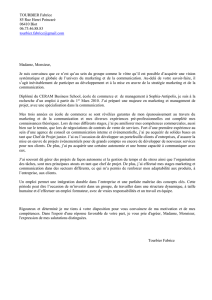
Réponse indicielle d'un système du 2ème ordre
Régime instable (m < -1)
0
100
200
300
400
500
600
700
800
900
1000
0 0,001 0,002 0,003 0,004
temps (s)
m = -1,1
(ω
0
= 2π × 1000 rad/s)

Fabrice Sincère
http://pagesperso-orange.fr/fabrice.sincere/
page 4/10
I-1-2- Deuxième cas :
∆
∆∆
∆
< 0
-1 < m < 1
L’équation caractéristique a deux racines complexes conjuguées : r
1, 2
= α ± βj
avec :
ω⋅−=
ω
ω
−
=β
ω⋅−=
ω
ω
−=α
0
2
2
0
0
2
0
2
0
0
m1
2
m12
m
2
m2
Solution générale de l’équation différentielle :
[
]
∞
⋅α
+⋅β⋅+⋅β⋅⋅= g)tsin(B)tcos(Ae g(t)
t
0 < m < 1 ⇒ α < 0 ⇒ système stable
(régime pseudo-périodique de pulsation :
0
2
m1 ω⋅−
)
m = 0
⇒
α = 0
⇒
système oscillant (pulsation ω
0
)
-1 < m < 0
⇒
α > 0
⇒
système instable
A et B sont deux constantes qui dépendent des conditions initiales :
β
α
=
−=
⇒
=β+α =+
⇒
=
===
∞
∞
∞
gB
gA
0BA
0gA
0
dt )0t(dg
0)0t(g
En définitive :
[
]
⋅β
β
α
−⋅β−=
+⋅β⋅+⋅β⋅⋅=
⋅α
∞
∞
⋅α
)tsin()tcos(e1g
g)tsin(B)tcos(Ae g(t)
t
t
(
)
(
)
⋅ω⋅−
−
+⋅ω⋅−−=
⋅ω⋅−
∞
tm1sin
m1
m
tm1cose1g g(t)
0
2
2
0
2
tm
0
(valable pour -1 < m < 1)

Fabrice Sincère
http://pagesperso-orange.fr/fabrice.sincere/
page 5/10
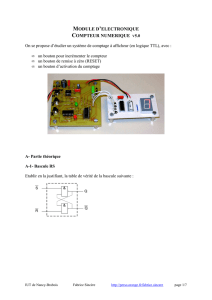
Réponse indicielle d'un système du 2ème ordre
Régime pseudo périodique ( 0 < m < 1 )
0
0,2
0,4
0,6
0,8
1
1,2
1,4
1,6
1,8
2
0 0,001 0,002 0,003 0,004
temps (s)
m = 0,1
m = 0,4
(ω
0
= 2π × 1000 rad/s)
m = 0 : système oscillant de pulsation ω
0
(
)
)tcos(1g g(t)
0
⋅ω−=
∞
Réponse indicielle d'un système du 2ème ordre
Régime oscillant ( m = 0 )
-0,5
0
0,5
1
1,5
2
2,5
0 0,001 0,002 0,003 0,004
temps (s)
m = 0
(ω
0
= 2π × 1000 rad/s)
 6
7
8
9
10
6
7
8
9
10
1
/
10
100%