La machine à courant continu

Le moteur à courant continu
TGM
1. Présentation générale
a) Conversion d’énergie
Le moteur à courant continu effectue une conversion d’énergie électrique en énergie
mécanique.
b) Constitution
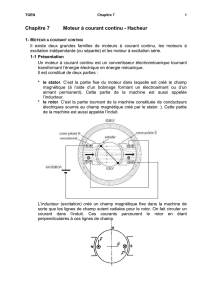
•Le circuit magnétique est constitué d’une
partie fixe, le stator, d’une partie tournante,
le rotor et de l’entrefer, l’espace entre les
deux parties.
•Le stator supporte le circuit électrique
inducteur, qui peut être réalisé avec des
bobines ou avec des aimants permanents.
•le rotor supporte le circuit électrique induit.
•Le système des balais et collecteurs permet
d’alimenter l’induit.
c) Symbole
2. Principe de fonctionnement
a) Couple électromagnétique
Lorsqu’on alimente l’inducteur par une source de tension continue, celui-ci produit un
champ magnétique dont les lignes de champ sont canalisées par le circuit magnétique.
1
énergie électrique fournie
pertes d’énergie
Moteur à courant
continu
énergie mécanique utile

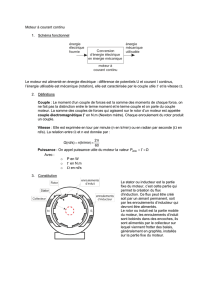
Circuit magnétique d’un moteur bipolaire Circuit magnétique d’un moteur tétrapolaire
On alimente ensuite l’induit par une autre source de tension continue.
Chacun des conducteurs de l’induit est alors parcouru par un courant et, placé dans le
champ magnétique inducteur, est soumis à une force de Laplace telle que : F = B.I.l.
L’intensité de cette force est proportionnelle à l’intensité I du courant induit et à
l’intensité B du champ magnétique créé par l’inducteur.
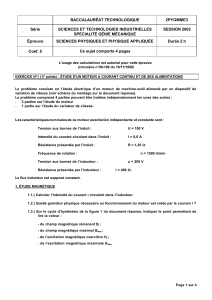
Deux conducteurs sont reliés pour former
une spire. Il apparaît donc deux forces de
même intensité F mais de sens opposés
qui forment un couple électromagnétique
d’intensité T = 2.r.F.
(r : rayon du rotor)
On a donc : T = 2.r.F = 2.r.B.I.l = S.B.I = Φ.I
Conclusion : On montre que le moment du couple électromagnétique total TEM exercé
sur l’induit vaut :
TEM = K.Φ.I
• Tem en newton mètre (N.m)
•K : constante du moteur qui ne dépend que de sa constitution (nombre total
de conducteurs N… on montre que K =
N
a
p.
..2
π
avec p nombre de paires de
pôles et a nombre de paires de voies d’enroulement),
• Φ : flux créé par un pôle inducteur, en webers (Wb)
•I : intensité du courant dans chaque conducteur de l’induit, en ampères (A)
b) Force électromotrice induite
Le flux magnétique embrassé par chaque spire de l’induit varie lorsqu’elle celle-ci est
entraînée en rotation. La loi de Faraday,
dt
d
e
Φ
−=
, implique qu’une f.é.m. induite e
apparaît aux bornes de cette spire. Il en est de même pour chaque spire de l’induit.
2

Conclusion : On montre que la f.é.m. induite totale E qui apparaît aux bornes de l’induit
vaut :
E = K.Φ.Ω
•E en volts (V)
•K est la même constante que précédemment,
• Φ : flux créé par un pôle inducteur, en webers (Wb)
• Ω : vitesse de rotation du moteur en radians par seconde (rad.s-1)
c) Réversibilité du moteur à courant continu
Si le rotor du moteur à courant continu est entraîné par un autre système et que
l’inducteur est alimenté, la loi de Faraday implique qu’une f.é.m. induite apparaît aux
bornes de l’induit : On peut y brancher un récepteur et recueillir de l’énergie électrique.
Il y a transformation d’énergie mécanique (du système d’entraînement) en énergie
électrique : c’est un fonctionnement en génératrice, semblable au fonctionnement
d’une dynamo de vélo.
3. Modèle équivalent du moteur à courant continu
a) L’induit
Pour une vitesse de rotation Ω constante et un flux Φ constant (c'est-à-dire un courant
inducteur IE constant), on relève la caractéristique U = f(I) de l’induit en « chargeant »
le moteur, c'est-à-dire en freinant progressivement le rotor par un système mécanique
appelé « charge ».
Comme E = K.Φ.Ω, E est constante dans cet essai.
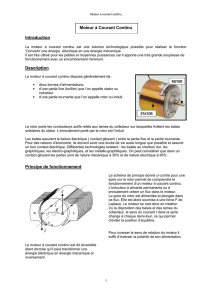
On obtient la caractéristique suivante :
•A vide (I ≈ 0), la tension U se confond avec la
f.é.m. induite E ;
•En charge (I ≠ 0), il faut augmenter U pour
garder la vitesse de rotation constante ;
•On calcule le coefficient directeur de la
caractéristique et on trouve que celui-ci a pour
valeur la résistance R des bobines de l’induit.
Conclusion : La caractéristique U = f(I) de l’induit a pour équation : U = E + R.I
3
U (V)
I (A)

Cette équation correspond au modèle
électrique équivalent suivant :
C’est le modèle équivalent de l’induit.
b) L’inducteur
L’inducteur est fixe par rapport au flux magnétique : il ne
subit pas d’induction.
Alimenté aussi en continu par une tension UE, son modèle
équivalent se réduit à la résistance RE des bobines de
l’inducteur.
Remarque : On appelle courant d’excitation le courant IE
car il est lié à l’excitation magnétique qui produit le flux dans
le moteur.
4. Puissances mises en jeu
a) Puissance absorbée
Le moteur absorbe la puissance électrique : PA = Pinduit + Pinducteur = U.I + UE.IE
b) Puissance et couple électromagnétiques
De l’équation de l’induit : U = E + R.I on déduit l’équation des puissances de l’induit :
U.I = E.I + R.I2
•PAI = U.I est la puissance absorbée par l’induit ;
•PJI = R.I2 est la puissance dissipée par effet joule dans la résistance de l’induit ;
•PEM = E.I est la puissance électromagnétique que l’induit transmet au rotor par
l’action du couple électromagnétique TEM.
Des équations fondamentales du moteur : E = KΦΩ et TEM = KΦI, on déduit que :
PEM = E.I = TEM.Ω
Il y a bien conservation de l’énergie.
4
E
U
I
R
RE
UE
IE

c) Puissances perdues
Lors de la transformation d’énergie, une partie de la puissance absorbée est perdue
sous forme de chaleur :
•pertes joules : PJ = PJI + PJE = R.I2 + RE.IE2 = R.I2 + UE.IE
•pertes mécaniques (frottements, ventilation) : PMECA
•pertes fer (courants induits dans le circuit magnétique et pertes dues au
phénomène d’hystérésis) : PFER
On appelle pertes collectives PC, la somme des pertes mécaniques et des pertes fer :
PC = PMECA + PFER
Propriété : lorsque le moteur fonctionne à flux constant, les pertes collectives sont
proportionnelles à la vitesse de rotation : PC = a.Ω avec a = constante.
On définit le moment du couple de pertes TP par la relation :
TP=
Ω
C
P
Conséquence : A flux constant, le moment du couple de perte TP est une constante du
moteur.
d) Puissance utile
C’est la puissance mécanique PU fournie à l’utilisateur. Elle correspond au moment du
couple utile tel que :
Tu =
Ω
Pu
e) Bilan des puissances
du graphe on déduit :
PEM = PC + Pu
d’où :
TEM = TP + Tu
5
PAI = U.I
R.IE
2 = UE.IE
PAE = UE.IE
R.I2
PEM
PC
Pu
conversion d’énergie
induit
inducteur
 6
7
8
6
7
8
1
/
8
100%