Les routines I2C

Le PIC16F84 Exemples
◘
Routines de gestion du port I2C
-----------------------------------------------------------------------------------------------------------------
NOTE sur BUS I2C
Le BUS I2C est un système matériel et logiciel de transmission de données entre plusieurs
équipements. Inventé par PHILIPS il fait partie de la de famille des BUS locaux (LAN) .
La transmission se fait sur 2 fils plus masse L’un des fils SDA transporte les données en série ,les
niveaux logiques étant 0 et 5V ,l’autre SCL porte un signal d’horloge qui synchronise les échanges.
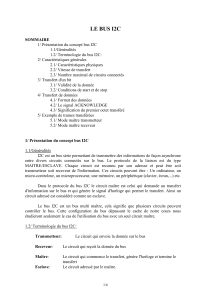
Les qualités du BUS I2C reposent entièrement sur la structure matérielle adoptée. Tous les
équipements sont accrochés en parallèle sur les deux fils du BUS . Chacun d’entre eux est constitué
d’un MOS destiné à forcer le niveau logique à zéro et un ampli permettant au circuit d’observer le
niveau présent sur le fil considéré. Cette possibilité de s’auto espionner permet de gérer les conflits
entre les divers équipements présents. Ainsi , si un seul
équipement force un fil du BUS au niveau bas , tous les
autres le verront au 0 ,c’est une structure ET CABLE .
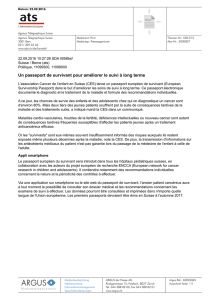
Circuit
Rs 100
Rp 4k7
+5V
SDA ou SCL Une résistance de PULL UP commune à tous les
circuits remonte à 1 le niveau des fils si tous les circuits
sortent un niveau haut . Une valeur typique de cette
résistance est 4700Ω .Une résistance série de 100Ω
facultative peut être placée en série avec chaque entrée;
elle est surtout utile si les fils sont longs (plusieurs mètres)
.
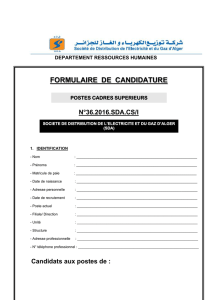
Lorsque aucun composant n’est actif les deux fils
CLC et SDA sont au
niveau haut le bus
est libre. ( F ) SDA
SCL
Envoi d'une donnée
L’état du fil de données SDA ne peut être modifié
que lorsque SCL est bas
Un bit de donnée (état de SDA ) est émis pendant l’état
haut de SCL Chaque envoi de bit est donc associé à une
impulsion sur SCL
La règle de non variation de SDA lorsque SCL
est haut est violée dans deux circonstances
importantes :
- La condition de Start : (S )
SDA passe de 1 à 0 pendant que SCL est au 1
- La condition de Stop (P )
SDA passe de 0 à 1 pendant que SCL est haute
Pour les circuits les plus courants (Première
génération) la fréquence d’horloge maximale (et conseillée ) est de 100kHz .
SCL=1
SDA
Condition
de START Condition
de STOP
Sur le BUS sont présents :
Un circuit maître qui pilote le transfert ,c’est lui qui génère les signaux d’horloge sur SCL il
peut envoyer des données vers les circuits esclave (émetteur ) ou en recevoir (Récepteur )
Des circuits esclave qui peuvent être des récepteurs recevant des octets venant du maître
ou des émetteurs qui envoient des octets vers le maître . Chaque circuit esclave possède une
adresse sur 7 bits . Les adresses ne sont pas distribuées au hasard mais attribuées par l’organisme
responsable du BUS I2C, chaque type de composant possède son adresse propre ,nous reviendrons
sur ce point plus loin.
FORMAT DU TRANSFERT :
Le transfert commence toujours par une condition de Start générée par le maître .
Sont envoyés ensuite successivement ,et accompagnés à chaque fois d’une impulsion
d’horloge ; 8 bits dont les 7 premiers constituent l’adresse de l’esclave que l’on veut contacter suivis
1

Le PIC16F84 Exemples
◘
d’un dernier bit qui indique le sens du transfert 1 pour une lecture esclave vers maître, 0 pour une
écriture maître vers esclave.
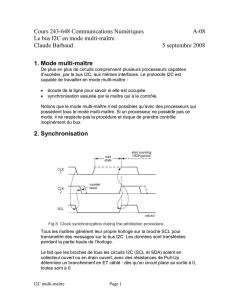
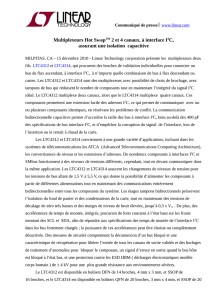
Le transfert se termine par un ACQUITTEMENT . Cet acquittement est une procédure
essentielle ;le maître relâche le fil SDA et génère un top d’horloge au cours duquel le circuit esclave
doit forcer à 0 le fil SDA pour indiquer qu’il a bien reçu le message.
123456789
0100 111WBus relaché
SDA
SDA piloté par l'esclave
ACK
Demande d'écriture vers l'esclave d'adresse 0100111
Un récepteur esclave peut dans certains cas ne pas accepter la donnée ,par exemple s’il est
occupé à une tâche, dans ce cas il ne valide pas acquittement et le maître peut ,soit générer une
condition de stop, soit s’adresser à un autre esclave plus disponible .
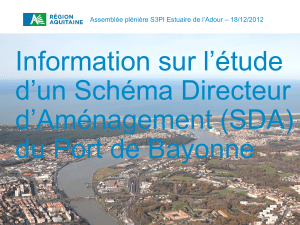
L’adresse étant envoyée le transfert se poursuit par la réception (dans ce cas l’esclave pilote
SDA au rythme de SCL envoyée par le maître ) ou l’émission d’un octet suivi d’un acquittement par
le récepteur .
Exemple :
SCL
12345 6789 12345 6789
S
1011000R
Lecture
SDA
A
P
Par l'esclave
10001011
Envo
y
é
p
ar l'esclave 8BH
Dans la suite nous simplifierons ce
dessin en : S Adrs Escl R/W A Data AP
Note: Il est possible de recevoir plusieurs octets à la suite les uns des autres, le maître doit acquiter
entre chacun sauf pour le dernier juste avant le STOP. JAMAIS d'ACQUITEMENT DEVANT LE
STOP FINAL
L'Horloge peut être irrégulière , seule la position relative des fronts compte.
Adresse 7bits 1AData1 AData2 AData3 1
DU MAÏTRE DE L’ESCLAVE
1
2

Le PIC16F84 Exemples
◘
Les PIC ne possèdent qu’un nombre très réduit de fils d’accès. Il est par exemple difficile de
connecter à un PIC un clavier , un afficheur et quelques leds de signalisation. Il est bien sûr possible
de mettre en œuvre des latches et des buffers 3 états connectés sur PB et sélectionnés à partir du
port A, mais cela alourdi considérablement le circuit imprimé et manque de souplesse.
Les circuits I2C n’utilisant que 2 fils seulement fournissent une solution élégante , mais il
faut gérer le bus I2C ce qui , à la différence du 80552 par exemple , n’est pas prévu à l’origine.
Voir note sur le port I2C
Le logiciel présenté ci dessous résout ce problème. ,on notera que les signaux d’acquittement
ne sont pas gérés c’est à dire que le processeur ne s’aperçoit pas si l’un des circuits n’acquitte pas . Il
n’est pas difficile d’introduire quelques lignes dans le programme pour remédier à ce manque .En
pratique si les boîtiers I2C sont câblés sur la même carte ou à faible distance les erreurs de
transmission sont rares. Et le logiciel présenté est suffisant.
Le port B du PIC est libre , il
permet par exemple de gérer les diodes
électroluminescentes de contrôle et
quelques poussoirs. Seuls les fils RA0° et
RA1 sont utilisés par les boîtiers I2C
reliés.
Connexion des circuits I2C
+5V
GND
PORT B
Circuit I2C
+5V
4,7k
SDA
SCL
Le fil RA1 qui pilote l’horloge est
programmé en sortie , la résistance de pull
up de 4,7k n’est donc pas nécessaire .Elle
l’est par contre pour le fil de données
RA0=SDA qui peut être entrée ou sortie.
Ce programme utilise 3 cases
mémoire que nous avons prises en haut
de la mémoire , mais il est facile de les
changer de place.
Votre programme de gestion des boîtiers I2C (Port PCF8574, horloge temps réel, EEPROM
etc…) devra être écrit à l’endroit indiqué.
A titre d’exemple un compteur sur le port I2C mettant en œuvre un PCF8574 est présenté
Title’ Gestion du bus I2C’
List p=16F628
#include<p16F628.inc>
_CONFIG 0x3F21 ;configuration des fusibles internes dans le cas
d’un ;PIC16F628
SDA EQU 0 ;pour SDA=RA0
SCL EQU 1 ;pour SCL=RA1
KTEUR EQU 0x20
BUFF EQU 0x21
ADRS EQU 0x22
OCTET EQU 0x23
DELAI1 EQU 0x24 ;utilisées par la routine de retard
DELAI2 EQU 0x25
org 0
Goto DEBUT
;------------------------------------------------------------
; Les MACROS
;------------------------------------------------------------
3

Le PIC16F84 Exemples
◘
SDAOUT MACRO ;met le fil SDA en sortie
BSF STATUS,RP0
BCF TRISA,SDA
BCF STATUS,RP0
endm
SDAIN MACRO ;met le fil SDA en entrée
BSF STATUS,RP0
BSF TRISA,SDA
BCF STATUS,RP0
endm
POSE MACRO ;sera intercalé pour respecter la vitesse possible du BUS
NOP
NOP
NOP
NOP
NOP
NOP
endm
SCLOUT MACRO
BSF STATUS,RP0
BCF TRISA,SCL
BCF STATUS,RP0
endm
;------------------------------------------------------------
ATTENTE ;attente longue pour routine de test
CLRF DELAI1
CLRF DELAI2
BCLDL DECFSZ DELAI2,1
GOTO BCLDL
DECFSZ DELAI1,1
GOTO BCLDL
RETURN
;============================================================
;Routines I2C
;=============================================================
START ;é met une condition de start
SDAOUT ;SDA en sortie (haut)
BSF PORTA,SDA ;SDA prépositionné haut
BSF PORTA,SCL ;SCL haut
POSE
BCF PORTA,SDA ;abaisse SDA alors que SCL est haute = START
POSE
BCF PORTA,SCL ;descente d'horloge pour sortie SCL basse
RETURN ;sortie avec SDA OUT
;---------------------------------------------------------
LITBIT ;place la valeur de SDA sur C
BTFSS PORTA,SDA ;saut si SDA=1
GOTO ZEROL
BSF STATUS,C ;C=1 si SDA=1
GOTO FINL
ZEROL BCF STATUS,C ;C=0
FINL RETURN
;--------------------------------------------------------
PLACEBIT ;place le contenu de C sur SDA
BTFSS STATUS,C ;saut si C=1
GOTO ZEROP ;executé si C=0
BSF PORTA,SDA ;SDA=1 si C=1
GOTO FINP
ZEROP BCF PORTA,SDA ;SDA=0 si C=0
4

Le PIC16F84 Exemples
◘
FINP RETURN
;--------------------------------------------------------
CLOCK ;génération d'une phase d'horloge par le maître
BSF PORTA,SCL ;montée d'horloge
POSE
CALL LITBIT ;L'état de SDA est transféré sur C
BCF PORTA,SCL ;descente d'horloge
RETURN ;sortie avec horloge basse
;---------------------------------------------------------
ACK ;Le maître émet un acquitement
BCF PORTA,SDA ;SDA=0 s'il ne l'était pas
CALL CLOCK
RETURN
;------------------------------------------------------------
NACK ;non acquitement
;ou attente acquitement esclave
SDAIN ;SDA doit être en entrée
CALL CLOCK ;L'esclave acquite SDA à la montée de SCL
;SDA est lu pendant le CLOCK
;sa valeur permet de vérifier que l'esclave
;a bien acquité .Nous ne l'avons pas fait
;cette amélioration est facile à ajouter
SDAOUT ;retour à SDA en sortie
RETURN
;-------------------------------------------------------------
STOP ;émet une condition de stop
BCF PORTA,SDA ;SDA à zéro s'il ne l'était pas
BSF PORTA,SCL ;horloge haute
POSE
BSF PORTA,SDA ;montée SDA alors que SCL est haute=STOP
RETURN ;sortie avec SDA HAUT et SCL HAUT
;--------------------------------------------------------------
INBYT ;Lit un octet envoyé par l'esclave
;l'octet reçu est chargé dans BUFF
SDAIN ;SDA doit être en entrée
CLRF BUFF ;BUFFER vidé, non indispensable
MOVLW 8
MOVWF KTEUR ;chargement du compteur avec 8
LOOP1 CALL CLOCK ; l'esclave charge SDA à la montée d'horloge
; et l’état de SDA est transféré dans C
RLF BUFF,1 ;introduction de C dans le LSB de BUFF
DECFSZ KTEUR,1 ;décrément compteur, saut si 0
GOTO LOOP1
SDAOUT ;retour à SDA en sortie
RETURN
;---------------------------------------------------------
OUTBYT ;l'octet à envoyer doit être dans BUFF
SDAOUT
MOVLW 8
MOVWF KTEUR
LOOP2 RLF BUFF,1 ;le bit le plus à gauche est placé dans C
CALL PLACEBIT ;place C dans SDA en sortie
CALL CLOCK ;top horloge envoi du bit
DECFSZ KTEUR,1
GOTO LOOP2
RETURN
;============================================================
;L'Adresse du port en écriture ou lecture est placée dans ADRS
;L'octet à envoyer est placé dans OCTET
;en position lecture l'octet lu est chargé dans OCTET
5
 6
7
6
7
1
/
7
100%