2.6.1 L`adressage des Entrées/Sorties 2.6.2 La programmation des

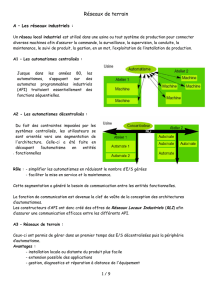
2.6 - LES ÉCHANGES D'ENTRÉE-SORTIE DANS LES SYSTÈMES A BASE
DE MICROPROCESSEURS ET MICROCONTRÔLEURS
2.6.1 L'adressage des Entrées/Sorties
Chaque périphérique est pourvu d'une adresse spécifique
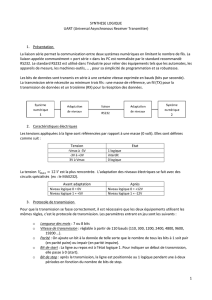
Deux philosophies d'adressage:
1- Adressage direct : Les périphériques sont adressés distinctement des positions
mémoires
2- Adressage des périphériques comme des positions mémoires
Mémoire E/S
(1) (2)
Remarque :
En mode 1, 4 signaux : écriture, lecture en mémoire et écriture, lecture sur
périphérique
4 instructions
En mode2, 2 signaux ; lecture, écriture
2 instructions
2.6.2 La programmation des entrées/sorties parallèles et séries
Mode parallèle :
Exemple : liaison centronics
Transmission de données par une liaison parallèle (8 ou 16-bit)
Rapide
Faibles distances
Mode série :
Exemple: liaison RS-232
Transmission bit par bit
Plus lente
FFFF
0000
Mém.
E/S
FFFF
0000
FF
00

Longues distances
Deux types : Synchrone
Asynchrone
Trois modes : Simplex, Half Duplex, Duplex
2.6.3 Les trois stratégies d'échange
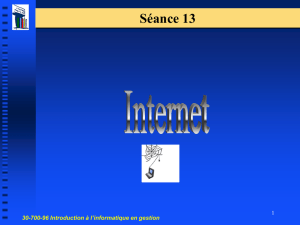
Le mode programmé (mode scrutation)
Mode programmé
Mode interruption
(Cas d'urgence)
Non
Non
Le périphérique 1 a-t-il quelque
chose à communiquer ?
Sauvegarde
du contexte
Passage au sous-
programme de
service
Restitution du
contexte
Le périphérique 2 a-t-il quelque
chose à communiquer ?
Le périphérique 3 a-t-il quelque
chose à communiquer ?
Oui
Oui
Oui
Non
Non
CPU
E/S
Demande
Int. autorisée
BUS
Vers périphérique
A
A
A

Mode Accès direct mémoire (DMA)
Relier directement le périphérique à la mémoire sans intervention de la CPU
Très grande vitesse de transfert de données
Trois techniques : DMA par arrêt du microprocesseur
DMA par vol de cycle
DMA multiplexé
2.6.4 LES E/S SÉRIES
2.6.4.1 Transmission série Asynchrone et synchrone
Transmission asynchrone :
Les mots sont transmis isolés dans le temps, le mot est borné par un bit start et un
ou deux bits stop, on ajoutera parfois un bit de parité. (rendement faible)
Transmission synchrone:
Les mots sont transmis sous forme d'une trame de mots successifs, borné par des
caractères de départ start et de fin stop. (rendement meilleur)
2.6.4.2 La norme RS232C
Introduction
Les liaisons séries permettent la communication entre deux systèmes numériques en limitant le
nombres de fils de transmission.
La liaison série aux normes RS-232C est utilisée dans tous les domaines de l'informatique (ex :
port de communication com1 et com2 des PC, permettant la communication avec des
périphériques tels que modem et souris). Elle est de type asynchrone, c'est à dire qu'elle ne
transmet pas de signal horloge.
La liaison RS-232C est une spécification électrique et mécanique uniquement. La manière de
transférer les données doit être définie par un protocole.
La norme RS-232C a connu plusieurs évolutions et améliorations (ex: RS-422, RS-423, RS-485).
Le schéma fonctionnel est le suivant :
Le terme "RS-232C" se réfère à un ensemble de spécifications relatives à ce type d'interface. La
norme RS-232C a été conçue par l'Association des Industries Électroniques (AIE).

Les ingénieurs de l'AIE n'étant pas assurés quant aux types d'équipement qui seraient développés
dans le futur, ont préféré laisser disponible un grand nombre de lignes afin que la norme RS-232C
soit aussi flexible que possible.
De nos jours, la plupart de ces lignes ne sont pas utilisées par les micro-ordinateurs.
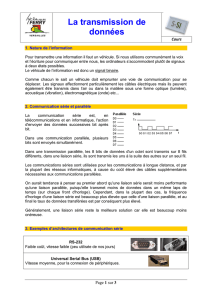
La figure suivante montre le brochage (affectations des broches) d'un connecteur RS-232C. Celui
qui est représenté ici est un connecteur "DB-25" est le type le plus usuel.
Le "DB-25" a 25 broches, mais certaines interfaces sérielles utilisent un connecteur plus petit DB-
9, possédant 9 broches. Dans les cas les plus fréquents, seulement sept de ces lignes sont utilisées.
Toutefois, notons qu'un système RS-232C peut fonctionner en n'utilisant que 3 lignes.
Brochage du connecteur DB-25
Remarque:
Une des difficultés consiste donc à savoir comment à été conçu l'équipement qui vous intéresse.
Est-il configuré comme un DTE ou comme un DCE ?
Voici comment procéder:
(Les indications sont données pour un connecteur 25 broches)
A l'aide d'un voltmètre, placez la pointe de touche noire sur la broche 7. Mesurez les tensions
entre cette broche et les broches 2 et 3. Si la valeur de tension obtenue pour la broche 2 est plus
négative que celle de la broche 3, cela signifie que l'on est configuré en DTE, sinon on est en
DCE.
La transmission série nécessite un minimum de 2 fils comportant les trames de données en
émission (Tx) et en réception (Rx).
L'adaptation des données se fait à l'aide d'un circuit adaptateur de ligne
(ex : MAX232), qui transforme les niveaux logiques issus du système numérique en niveaux
logiques compatibles avec les normes RS-232C et vice versa.

Avant adaptation :
Les niveaux logiques sont les suivants :
niveau 0 = 0 V
niveau 1 = 5 V
Après adaptation :
Les niveaux logiques sont les suivants :
niveau 0 = +12 V
niveau 1 = -12 V
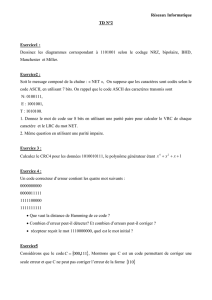
Configuration minimale:
Dans une liaison RS-232C, une extrémité est désignée comme "Equipement Terminal de
Données" ou ETD (DTE), et l'autre est appelée "Equipement de Communication de Données" ou
ECD (DCE). Les diverses lignes de la liaison sont nommées par rapport à l'ordinateur. Par
exemple, la ligne 2 est nommée "TRANSMISSION DE DONNÉES" parce qu'elle transporte le
signal qui est émis à partir de l'ordinateur. Dans un système ordinateur/modem, l'ordinateur est le
terminal (ETD) ou terminal de données, et le modem est le communicateur ou (ECD).
Dans l'interface la plus simple possible, les trois lignes clés sont reliées aux points 2, 3, et 7 sur le
connecteur RS-232C. Cela est illustré par la figure 5. La ligne 2 transporte les "données
transmises" du terminal au communicateur. La ligne 3 transporte les "données reçues" du
communicateur au terminal. La ligne 7 est une masse pour les deux lignes précitées.
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
1
/
36
100%