PDF (Partie 2 : chapitre IV, conclusion générale, annexes


Chapitre 4
EXPÉRIMENTATION ET
PROTOTYPES DE STRUCTURES
MAGNÉTIQUES ROBUSTES
Sommaire
4.1 Introduction ................................. 124
4.2 Banc d’essai : Prototypes de coupleurs magnétiques robustes . . . . . . 124
4.2.1 Convertisseur multicellulaire parallèle . . . . . . . . . . . . . . . . 124
4.2.2 Structure monolithique 6 phases avec insertion d’entrefers . . . . . 124
4.2.3 Structure transformateurs séparés "mono-bobine" . . . . . . . . . . 129
4.2.4 Asservissement du convertisseur . . . . . . . . . . . . . . . . . . . 131
4.2.5 Méthode de mesures du champ magnétique . . . . . . . . . . . . . 136
4.3 Résultats expérimentaux . . . . . . . . . . . . . . . . . . . . . . . . . . 138
4.3.1 Caractérisation des inductances du coupleur . . . . . . . . . . . . . 138
4.3.2 Déconnexions de cellule(s) de commutation . . . . . . . . . . . . . 142
4.3.3 Remise en conduction de cellules de commutation . . . . . . . . . 151
4.3.4 Mesure de rendement . . . . . . . . . . . . . . . . . . . . . . . . . 153
4.4 Conclusion du chapitre . . . . . . . . . . . . . . . . . . . . . . . . . . . 155
123

4.1. INTRODUCTION
4.1 Introduction
Dans ce chapitre, nous évaluons d’un point de vue expérimental deux coupleurs magné-
tiques robustes en régimes déséquilibrés. Le premier est un coupleur monolithique 6 phases
en topologie circulaire et le deuxième correspond à des transformateurs séparés utilisant une
seule bobine par phase.
Profitant d’entrefers "larges", les noyaux seront instrumentés pour la mesure des compo-
santes continues du flux. L’ensemble des éléments (noyaux + culasses) seront également ins-
trumentés pour mesurer les composantes alternatives du flux. Cette instrumentation sera une
aide précieuse pour reconstruire la composante totale du champ magnétique circulant dans le
coupleur. Ces informations nous permettront d’analyser et de valider le comportement magné-
tique de ces coupleurs lors d’un régime déséquilibré.
Une méthode d’asservissement adaptatif des courants de phases en boucle fermée, capable
de prendre en compte plusieurs déconnexions de phases, est présentée dans ce chapitre expé-
rimental.
4.2 Banc d’essai : Prototypes de coupleurs magnétiques ro-
bustes
4.2.1 Convertisseur multicellulaire parallèle
Les essais des coupleurs robustes ont été réalisés sur un convertisseur modulaire à 2x6
phases en parallèle, réalisé antérieurement à notre thèse. Dans notre cas d’étude, nous n’utili-
serons qu’un groupe de 6 phases en parallèle puisque nos deux coupleurs sont composés de 6
phases en régime nominal. Le convertisseur est donc composé de six cellules de commutation
à base d’IGBT 600V/100A ( IXXN100N60B3H1 IXYS), intégrant une diode en parallèle, le
tout assemblé dans un boîtier isolé de type "Isotop". Les fonctionnements onduleur et hacheur
réversible en courant sont donc possibles. Le refroidissement de ces modules de puissance
s’effectue par convection forcée au moyen d’une plaque à eau. Le bus continu est réalisé par
une alimentation continue variable ELEKTRO de 10kW (1000V/30A).
La charge est constituée de deux bancs de charges résistifs d’une puissance nominale de
10kW chacun.
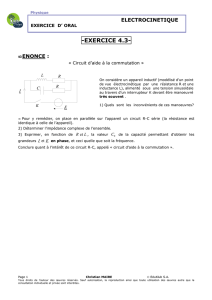
La figure 4.1 illustre le banc d’essai complet avec ces éléments constitutifs.
4.2.2 Structure monolithique 6 phases avec insertion d’entrefers
Design, matériaux choisis, fabrication (usinage, collage, polissage,..)
Au vu de la modélisation des coupleurs magnétiques lors d’un fonctionnement nominal et
sous un régime déséquilibré, notre choix s’est porté vers la conception d’un coupleur mono-
lithique à 6 phases en topologie échelle fermée avec des entrefers "larges". Nous avons dé-
montré que pour un nombre de phases supérieur à cinq, le volume d’un coupleur monolithique
devenait plus compétitif que la solution utilisant des transformateurs séparés. Nous choisis-
sons donc une structure à 6 phases dimensionnée pour un fonctionnement nominal. L’insertion
-124-

CHAPITRE 4. EXPÉRIMENTATION ET PROTOTYPES COUPLEURS ROBUSTES
Alimentation continue 10kW
Convertisseur parallèle
2 x 6 phases Coupleur monolithique
(a) Vue d’ensemble du banc d’essai expérimental.
Convertisseur parallèle
2 x 6 phases Coupleur monolithique
instrumenté
Capteur courant
Mesure différentielle
Capteur courant
Mesure fort courant Carte PCB 1mm
Capteur effet hall champ DC
(b) Gros plan sur le coupleur monolithique instrumenté
Figure 4.1 – Vue d’ensemble du banc d’essai expérimental.
d’entrefers "larges" permettra de maintenir le fonctionnement suite à des forts déséquilibres
ou lors de l’arrêt d’une ou plusieurs cellules de commutation.
Pour des raisons de réalisation, la conception de cette topologie nécessite l’utilisation de
noyaux standardisés disponibles dans le commerce, permettant d’obtenir une forme parallé-
lépipédique. En effet, il aurait été envisageable mais très difficile et coûteux de concevoir ce
coupleur de manière circulaire, puisque le circuit magnétique doit être réalisé sur-mesure.
Le principe de réalisation choisi consiste donc à utiliser des ferrites en forme de U pour
créer les zones de culasses inférieures et supérieures. Des noyaux en forme de I sont ensuite
collés sur la culasse inférieure pour créer des colonnes verticales. La culasse supérieure n’est
pas collée et est donc volontairement amovible pour permettre la réalisation d’entrefers cali-
brés uniformément et réglables. Des capteurs actifs et planaires à effet hall seront logés dans
la région des entrefers verticaux pour mesurer le champ magnétique DC circulant dans les
noyaux. Nous présenterons dans la suite du chapitre cette méthode de mesure.
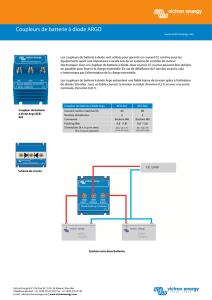
Une illustration de l’assemblage des noyaux est montrée sur la figure 4.2. Pour des raisons
de validation expérimentale, nous utilisons pour ce prototype des culasses dites "tailles hautes",
i.e. que la section des noyaux et des culasses sont identiques, contrairement à ce que pourrait
être une réalisation industrialisable plus optimisée.
-125-

4.2. BANC D’ESSAI : PROTOTYPES DE COUPLEURS MAGNÉTIQUES ROBUSTES
Cette solution permet d’utiliser ce coupleur sans saturation lorsque les cellules de com-
mutation sont alimentées de manière régulière. Dans un cas optimal, il aurait été possible de
prendre une section de culasse moitié moins importante que les noyaux en considérant une
alimentation permutée des cellules de commutation.
LN=30mm
PN=28mm
HN=58mm
LB=34mm
(a) Culasse inférieure formée de deux "U" collés
sur laquelle sont placées les six noyaux verticaux
de forme "I".
152mm
93mm
Entrefer résiduel collé
(b) Culasse supérieure amovible formée de deux
"U" collés, rectifiés puis polis sur la tranche du côté
des régions d’entrefers permettant d’ajuster les en-
trefers.
Figure 4.2 – Photo des éléments constituants le coupleur monolithique robuste en échelle
fermée à 6 phases. Mise en évidence de la culasse supérieure amovible permettant la création
de zones d’entrefers ajustables ( HN=58mm, LB=34mm, Ae=8,4.10−4m2).
Selon cette démarche, plusieurs noyaux en forme de U ont donc été sélectionnés. Nous
choisissons les facteurs de formes géométriques b,cet dintroduits dans le chapitre 2 (b=d=1
et c=0.85) permettant d’avoir une section de noyau carrée et une surface de bobinage optimisée.
Ces facteurs de formes nous permettant de déterminer la hauteur des noyaux verticaux et la lar-
geur de bobinages. Ainsi, notre choix s’est porté vers des noyaux en formes de U (U93/76/30)
et I (I93/28/30) de la société Epcos en matériau Manganèse Zinc N87 (BSAT =0,49T à 25◦C et
0,39T à 25◦C, µR=2200 à 25◦C, Pf er(25kHz, 200mT,100◦C)=57kW/m3).
Plusieurs phases d’usinages, réalisées par Didier Flumian avec une tronçonneuse numé-
rique, ont été ensuite conduites sur la plate-forme d’intégration hybride en électronique de
puissance (3DPHI). Les noyaux sont également passés par plusieurs phases de rectification,
polissages permettant d’assurer une bonne planéité sur les jonctions noyaux/culasses, et ainsi
d’éviter les disparités sur les valeurs des entrefers résiduels. Nous verrons cependant que des
écarts sur les composantes continues et alternatives entre les six noyaux persistent même après
cette phase de polissage, en présence d’entrefers "fins".
Dimensionnement du bobinage, spécifications prévisionnelles
Partant de cette géométrie de coupleur, nous utilisons la démarche de détermination des
caractéristiques électriques présentée au chapitre 2 dans le but d’extraire les paramètres élec-
triques que le prototype est capable de supporter. La figure 4.3 présente l’évolution de la
-126-
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
1
/
66
100%