10. Les interruptions

1
Traduit et adapté de l’anglaisTraduit et adapté de sources anglaises
Chap.10
Interruptions
MounirBoukadoum
Traduit et adapté de l’anglaisTraduit et adapté de sources anglaises
Programmesetpilotesdepériphériques

2
Traduit et adapté de l’anglaisTraduit et adapté de sources anglaises
Principegénérald’uneinterruption
•Arrêttemporairedel'exécutiond'un
programme,suiteàunévènement
logicieloumatériel,afind'exécuter
unsous‐programmedontl’adresse
dépenddutyped’évènement
•L’exécutiondusous‐programmese
termineparlarestaurationdel'état
sauvéduCPUquirepartdel'endroit
oùilaétéinterrompu.
•Différenceavecunsousprogramme
conventionnel:
–L’adressedusautestprédéfinie
–Certainsregistressontsauvés
automatiquementlorsdusautet
remisenétatauretour
Traduit et adapté de l’anglaisTraduit et adapté de sources anglaises
Exemplesd’évènementssources
d’interruptions
Déplacement desouris
Entréedecaractère auclavier
Secteur dedisque défectueux
Compte terminald’untemporisateur
Disfonctionnement del’imprimante
Accès delacartevidéo vers lamémoire
Emissionetréception parleModem
Faute d’accès en mémoire
Lectured’uncoded’instruction inconnu
Etc.

3
Traduit et adapté de l’anglaisTraduit et adapté de sources anglaises
Butsd’utilisation
•Gestiondeconditionsd’exception
•Communicationnonbloquante avecdes
périphériquesexternes
–Communicationsansdélaisd’attentequimènesouventà
uneéconomied’énergieenmettantleCPUdansunétat
dormantaulieudetournerdansuneboucled’attente.
•Appelsdeserviceetcommutationdetâchesdansun
systèmegéréparunprogrammed’exploitation
Traduit et adapté de l’anglaisTraduit et adapté de sources anglaises
Deuxtypesfondamentaux
d’interruptions
•Logicielle
–L’instructionSWI détourneleprogrammeversunautre
programme(e.g.servicedusystèmed’exploitation)
•Matérielle
–UnsignalinterneduCPUouuneligneexternedétournele
programmeversunautreprogramme(e.g.pilotede
périphérique)
•Permetlasynchronisationsanspasserparuneboucled’attente.
•Cellesenprovenanced’unehorlogepeuventpermettrela
répartitiondestâchesdansunsystèmemultitâchesoumulti‐
usager

4
Traduit et adapté de l’anglaisTraduit et adapté de sources anglaises
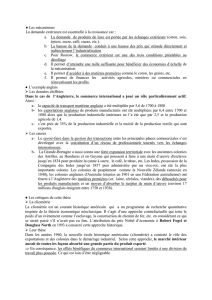
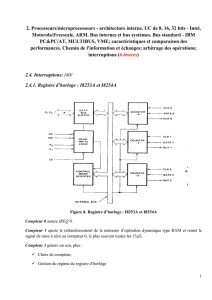
Branchementdesourcesmutiples
Lignes individuelles
à drain/collecteur
ouvert
Ligne de requête externe commune
Traduit et adapté de l’anglaisTraduit et adapté de sources anglaises
•Lesétapesavantetaprèsl’exécutiondelaroutinederéponseà
l’interruptionintroduisentdesdélaisquis’ajoutentautempsderéponse
–Effetlimitatifsurlenombredesourcesentemps‐réel
•Lessourcesontdesprioritésfixesouprogrammables
–Blocagedesourcesdemoindreprioritépard’autresdeprioritéplusélevée
IRQ
Processusgénérald’interruption

5
Traduit et adapté de l’anglaisTraduit et adapté de sources anglaises
adresse source
d’IRQ Bit
CCR Bit
spécifique adresse source
d’IRQ bit du
CCR Bit de
gestion
0xffc0-d5 Réservés - - 0xffea-b IC3 I IC3I
0xffd6-7 SCI I RIE, TIE,
TCIE, ILIE 0xffec-d IC2 I IC2I
0xffd8-9 SPI I SPIE 0xffee-f IC1 I IC1I
0xffda-b PA I PAII 0xfff0-1 RTI I RTII
0xffdc-d PA
OFLW I PAOVI 0xfff2-3 IRQ I -
0xffde-f TIMER I TOI 0xfff4-5 XIRQ X -
0xffe0-1 IC4/OC5 I I4/O5I 0xfff6-7 SWI - -
0xffe2-3 OC4 I OC4I 0xfff8-9 Ill.
Opcode --
0xffe4-5 OC3 I OC3I 0xfffa-b COP - NOCOP
0xffe6-7 OC2 I OC2I 0xfffc-d CLK
mon. --
0xffe8-9 OC1 I OC1I 0xfffe-f RESET - -
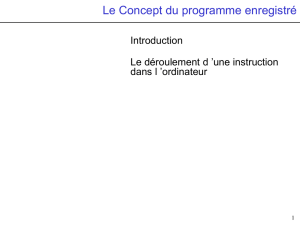
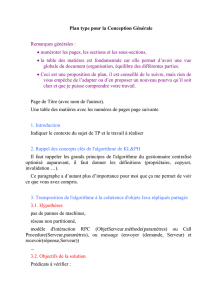
Adresses des routines
de réponse
• Appelées vecteurs
• Emmagasinées dans
une table
• Les priorité sont établies
par la position dans la
table
Ex. Vecteurs d’interruption
normaux du 68HC11 et bits
de commande associés
Traduit et adapté de l’anglaisTraduit et adapté de sources anglaises Monjy Rabemanantsoa 10
 6
7
8
9
10
11
12
13
14
15
16
17
18
6
7
8
9
10
11
12
13
14
15
16
17
18
1
/
18
100%