Lieu des Pôles: Représentation Graphique en Automatique

Asservissements linéaires Représentations graphiques
Jean-Marc Allenbach 5–12 021010
5.5 REPRÉSENTATION DU LIEU DES PÔLES
5.5.1 Fondements théoriques
En étudiant un système du deuxième ordre (§ 4.5.2), on a vu que la valeur de ses pôles
est déterminante pour son comportement dynamique. On peut généraliser cette affirmation
aux systèmes d'ordre plus élevé. En toute généralité, les pôles, tout comme les zéros, sont des
nombres complexes qu'on peut représenter dans le plan. Leur emplacement dans le plan com-
plexe revêt une importance particulière dans l'étude de la stabilité (chap. 6). Dans la pratique,
on est souvent placé dans la situation d'un système en boucle fermée Gcf (fig. 5.1) dont on veut
étudier le comportement dynamique. On connaît le gain, les pôles et les zéros du système en
boucle ouverte G0. Il s'agit donc de tracer l'emplacement des pôles et zéros du système en
boucle fermée en fonction de ce qu'on connaît.
Gs k szsz sz
spsp sp kNs
Ds
00 2m
2n
0
() ()()( )
()()()
()
()
=−− −
−− −
=
1
1
0
0
K
K
(5.20)
On a vu que, pour des systèmes physiques réels, le degré m du numérateur est plus
petit que n, celui du dénominateur. On peut calculer la fonction de transfert en boucle fermée
selon (4.12).
Gs Gs
Gs kN s
kN s Ds
cf o
o
0
00
() ()
() ()
() ()
=+=+10
0 (5.21)
Selon la définition des pôles (§ 4.2.2), les pôles en boucle fermée sont les racines du
polynôme dénominateur de la fonction de transfert en boucle fermée, soit les solutions de
l'équation caractéristique (5.22).
kN s Ds
00
00
() ()+= (5.22)
On appelle lieu des pôles du système en boucle fermée, ou lieu d'Evans, l'ensemble des
points du plan complexe qui sont solution de l'équation caractéristique lorsqu'on fait varier le
facteur d'Evans en boucle ouverte k0 de 0 à +∞. On peut injecter (5.20) dans (5.22).
ksz sz sz sp sp sp
02m 2n
()()()()()()−− −+−− −=
11
0KK (5.23)
Cette équation a n solutions: les pôles en boucle fermée sont donc en même nombre
que les pôles en boucle ouverte. La recherche des solutions de (5.23) doit être entreprise pour
chaque valeur de , on n'applique la méthode analytique que si on dispose d'outils informatique
pour exécuter ce travail fastidieux et répétitif. On étudiera au paragraphe suivant une méthode
graphique qui requiert un minimum de calculs et qu'on applique en absence de moyens de
calculs importants. On peut aussi écrire la relation (5.23) en mettant en évidence le facteur
d'Evans.
−=−− −
−− −
kspsp sp
szsz sz
02n
2m
()()()
()()( )
1
1
K
K
(5.24)
Cette équation complexe (5.24) est vérifiée pour tout point du plan complexe –
nombre complexe s – qui appartient au lieu des pôles. Elle doit donc être vraie tant pour le
module que pour l'argument de ces nombres complexes. Le complexe –k0 a un module de k0 et
un argument qui est un multiple impair de π, à cause de son signe négatif. On peut donc
récrire (5.24) sous forme de deux équations: module et argument.

Asservissements linéaires Représentations graphiques
Jean-Marc Allenbach 5–13 021010
kspsp sp
szsz sz
02n
2m
=−− −
−− −
()()()
()()( )
1
1
K
K
(5.25)
()arg(
()()()
()()( )
)21 1
1
kspsp sp
szsz sz k+= −− −
−− − ∈
2n
2m
K
K
N (5.26)
Avant d'entrer dans la procédure graphique, il est judicieux ici de préciser le sens
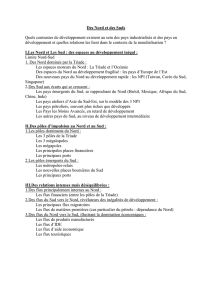
géométrique de la relation (5.24).
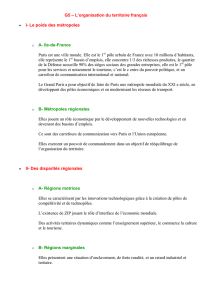
Fig. 5.14 Vecteurs complexes dans le plan d'Evans.
Chaque terme de (5.24) représente un vecteur pointé en s, un point du lieu des pôles, et
ayant pour origine soit un pôle pi du système en boucle ouverte soit un zéro zj du système en
boucle ouverte. De cette signification géométrique, on peut tirer deux propriétés du lieu des
pôles.
La condition des modules: Si pour un point du lieu des pôles, on calcule le produit des
longueurs (modules) des vecteurs qui le relient aux divers pôles en boucle ouverte et qu'on
divise ce résultat par le produit des longueurs des vecteurs qui le relient aux zéros en boucle
ouverte, on obtient le facteur d'Evans k0 . Cela résulte de (5.25).
kspsp sp
szsz sz
sp
sz
i
n
j
m
02n
2m
i
=1
j
=1
=−− −
−− −=−
−
∏
∏
1
1
K
K
(5.27)
La condition des angles: Si on calcule la somme des arguments des vecteurs qui le
relient aux divers pôles en boucle ouverte et qu'on y soustrait la somme des arguments des
vecteurs qui le relient aux zéros en boucle ouverte, on obtient toujours un multiple impair de
π. Cela résulte de (5.26).
( ) arg( ) arg( ) arg( ) arg( ) arg( ) arg( )
arg( ) arg( )
21 12 1
11
kspspspszszsz
sp sz
i
n
j
m
+=−+−+−−−−−−−
=−−−
==
åå
π
KK
n2m
ij
(5.28)
s
z
j
s – zj
α
j
pi
s – pi
β
i
Im
Re

Asservissements linéaires Représentations graphiques
Jean-Marc Allenbach 5–14 021010
On peut citer encore d'autre propriétés. Si on fait tendre k0 vers zéro dans (5.23), on
obtient les points de départ du lieu des pôles en boucle fermée: ce sont les pôles en boucle
ouverte. Le lieu des pôles compte donc n branches.
()()()spsp sp−− −=
10
2n
K (5.29)
Si on fait tendre k0 vers infini dans (5.23), on obtient des points d'arrivée du lieu des
pôles en boucle fermée: ce sont les zéros en boucle ouverte. Les n – m autres points d'arrivée
des branches sont situés à l'infini.
()()( )szsz sz−− −=
10
2m
K (5.30)
Parce que N0 et D0 sont des polynômes en s à coefficients réels, on en déduit que les
lieu des pôles est symétrique par rapport à l'axe réel. Cela permet d'alléger le dessin.
5.5.2 Méthode de tracé
Le tracé du lieu des pôles se base sur les propriétés décrites au paragraphe précédent et
applique les résultats du calcul complexe. On illustre le propos avec l'exemple (5.3).
Gs ss
ss s
03 0 333 0 05
10501
() (,)(,)
()(,)(,)
=−− +
++ + (5.31)
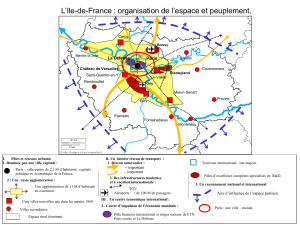
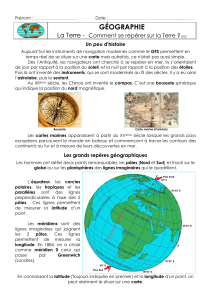
D'abord, on place dans le plan complexe les pôles (x) et les zéros (o) du système en
boucle ouverte.
• Les pôles sont –1, –0,5 et –0,1; les zéros sont –0,05 et +0,333.
Une partie de l'axe réel peut faire partie du lieu des pôles: c'est l'ensemble des pôles
situés à gauche d'un nombre impair de pôles et zéros réels. Si on a un signe négatif devant un
s au numérateur ou dénominateur, celui-ci apparaît en facteur dans l'écriture d'Evans, ce qui
retourne la figure autour d'un axe vertical: "gauche" devient "droite".
• Les portions de l'axe entre les pôles –1 et –0,5, entre le pôle –0,1 et le zéro –0,05 et à droite
du zéro 0,333 appartiennent au lieu des pôles.
Les pôles en boucle ouvertes sont des points de départ du lieu, les zéros, des points
d'arrivée. Les n–m points d'arrivée restants sont situés à l'infini, selon des directions
asymptotiques
ξ
formant une étoile régulière de centre ca situé sur l'axe réel.
ξ
π
=+ −
()12qnm qavec entier quelconque (5.32)
c
pz
nm
j
m
i
n
a
ij
=−
−== åå 11 (5.33)
Si le facteur d'Evans est négatif, il faut additionner –
π
aux directions asymptotiques obtenues
par (5.32).

Asservissements linéaires Représentations graphiques
Jean-Marc Allenbach 5–15 021010
•
ξ
π
π
π
=+ −=± =() ; ;;12 32 02310qq--avec 1 et addition de (5.34)
ca=−+− +− −− −
−=−
1 0 5 0 1 0 05 0 333
32 1833
(,)(,)(,)(, ) , (5.35)
Lorsqu'une portion de l'axe réel est comprise entre deux pôles, il existe sur ce tronçon
un point de séparation cs à partir duquel les branches divergent en devenant conjuguées
complexes. Lorsqu'une portion de l'axe réel est comprise entre deux zéros ou entre un zéro et
une direction asymptotique (0 ou π), il existe sur ce tronçon un point de jonction cs vers lequel
les branches conjuguées complexes convergent. Les branches complexes arrivent ou partent
aux points cs avec une tangente verticale. Avec les moyens de calcul informatique disponible
aujourd'hui, on ne va pas plus loin avec le calcul manuel. On donne cependant quelques
propriétés à titre d'information. pour trouver les points de séparation, on cherche les solutions
de l'égalité (5.36).
11
0
11
cz cp
j
m
i
n
sj si
−−−=
==
åå (5.36)
• On résout (5.36) avec un algorithme de bissection en partant de deux points qui encadrent à
coup sûr la solution en gardant ensuite à chaque fois l'intervalle cadré par un résultat positif
et un négatif. On arrête l'algorithme lorsqu'on atteint une précision qui convient.
cc
s1 s2
=− =0 725 144,, (5.37)
On peut encore calculer la valeur du facteur d'Evans pour un point quelconque pfx du
lieu: il suffit de remplacer s par pfx dans (5.24). On peut aussi calculer les intersection avec
des droites remarquables:
axe imaginaire pfx = ± j x
(5.38)
droite à 45° passant par l'origine pfx = x ± j x (5.39)
droite passant par l'origine à 30° de l'axe imaginaire pfx = x ± j 3x
(5.40)
On peut enfin calculer la pente
ϑ
du lieu des pôles en un point pfx quelconque. On a
établi cette expression à partir de la condition des angles.
θπ
=−−−−
==
åå
arg( ) arg( )pz pp
j
m
i
n
fx j fx i
11 (5.41)

Asservissements linéaires Représentations graphiques
Jean-Marc Allenbach 5–16 021010
Fig. 5.15 Tracé des pôles de (5.3) .
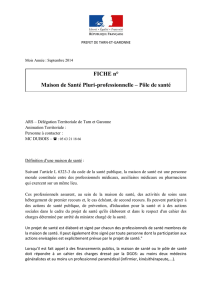
5.5.3 Assistance de tracé par ordinateur
Pour le tracé du lieu des pôles, on fait appel à deux fonctions complémentaires qui
assurent respectivement le tracé des pôles en boucle ouverte et celui des pôles en boucle
fermée en fonction du gain variable k.
>> pzmap(num,den)
>> rlocus(num,den,k)
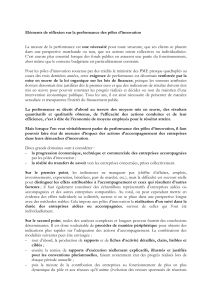
On a aussi développé au Laboratoire d'Automatique de l'eig un programme affevans
qui contient tout l'environnement de confort et facilite ainsi l'obtention du résultat. En outre,
on affiche sur le même graphique le contour d'Evans défini par la marge de stabilité absolue et
la marge de stabilité relative. Ces notions sont définies au chapitre suivant (§ 6.6.1).
-2 -1.5 -1 -0.5 00.5 11.5 2
-1.5
-1
-0.5
0
0.5
1
1.5
Diagramme de Evans: Go(s)= Ko -----------------------------------------------------------------------
(1-3*s)*(1+20*s)
(1+1*s)*(1+2*s)*(1+10*s)
Fig. 5.16 Tracé des pôles de (5.3) obtenu avec affevans.
Im
Re
0,5 j
–
0,725
0,5
-0,5 j
–
0,5
1,44
1
–
1
1
/
5
100%