Table de vibration

Jean-Yves GANCEL 1/6
SISMOS à l’école
Lycée technologique Jacquard
2 rue Bouret 75019 PARIS
P A R F
E
Z
N
TABLE DE VIBRATION
Objet de ce dossier : comment réaliser une table de vibration ?
But de cette étude : avoir un outil pour pouvoir développer dans le futur des
capteurs de vibration de type vélocimètre ( du purement pédagogique au capteur
performant…si possible !...).
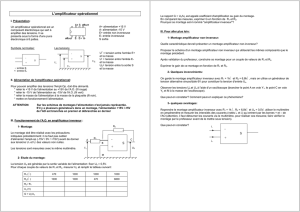
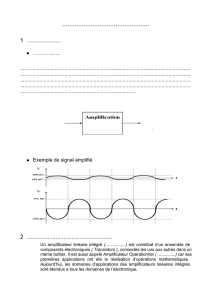
Principe général retenu pour fabriquer la table de vibration.
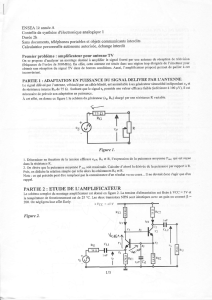
1°) Schéma :
+
+
+
+ +
+15V
15V
Masse
Al iment at i on
30V / 2,5A
Al iment at i on
+ 15V / 2,5A
_ 15V / 2,5A
Bobine 2A / 10 Ohms
à noyau
Bobine 2A / 10 Ohms
à noyau
Amplificat eur
de
puissance
Bobine 2A
noyau fer r omagnétique
générat eur
de
fonct ions
Masse

Les deux alimentations et le générateur de fonctions sont disponibles dans tout
laboratoire de physique, ainsi que les deux bobines 2A / 10Ω (bobines Sutter par
exemple).
Seuls, l’amplificateur de puissance et la troisième bobine sont à fabriquer : le noyau
doit s’acheter auprès d’un fournisseur spécialisé.
Voir document annexe n°2 :
« Comment réaliser la partie amplificateur de puissance ? »
2°) Le fonctionnement.
L’alimentation continue 30V / 2,5A, sert à alimenter les deux bobines 2A / 10Ω
pour obtenir deux pôles magnétiques de même nom l’un face à l’autre. (mettre les
30V ; les bobines sont telles qu’alors le courant vaut autour de 2A).
L’alimentation continue + 15V, - 15V / 2,5A sert à l’apport d’énergie pour
l’amplificateur de puissance.
La forme de tension appliquée à la troisième bobine dépend du réglage du
générateur de fonction.
Comment fonctionne l’ensemble ?
Les pôles fixes étant présents, la troisième bobine qui peut se déplacer sur le noyau
est le siège d’un courant de fréquence variable, d’intensité et d’allure réglables.
La bobine se met alors en mouvement au rythme de la fréquence imposée.
3°) Que faire avec cette table ?
Dans l’immédiat, j’utilise cette table pour faire travailler mes élèves de seconde en
option MPI…
Voir document annexe n°1
« progression du cours de seconde MPI au lycée Jacquard »
Dans le futur, il faudra améliorer la linéarité de réponse mécanique à la sollicitation
électrique de vibration. Deux étapes doivent être réalisées :
monter sur la table un capteur de position de manière à vérifier la fidélité de
réponse de la table à la sollicitation voulue,
éventuellement développer une carte pour asservir la position de la table à
la commande de vibration.
Dès à présent, penser au principe du capteur de type vélocimètre à développer.

Jean-Yves GANCEL
3/6
Conclusion.
La table est fabriquée et opérationnelle dans sa première version au lycée
Jacquard : toute personne intéressée pour la voir en fonctionnement peut me
contacter par téléphone au lycée Jacquard.
Téléphone: 01 44 84 40 00 demander Jean-Yves GANCEL
En fin d’année scolaire et en fonction du travail des élèves de seconde, on pourra
envisager un dossier de mesures sur cette table :
• données sur la bobine qui vibre ;
• réseau de courbes donnant Vs/Ve en fonction de la fréquence paramètrée en
fonction du niveau de commande pour l’amplificateur ;
• courbe de linéarité déplacement mécanique de la table en fonction de la
commande électrique.

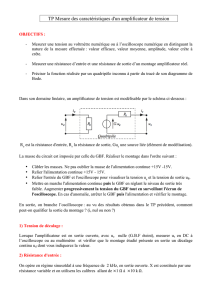
ANNEXE N°1
« progression du cours de seconde MPI au lycée Jacquard »
Le projet débute le 25 Mars 2008 et se termine à la fin de l’année scolaire.
• 25/03/2008
Découverte du projet « Sismos à l’école » à travers l’utilisation d’internet : mesure de l’impédance de la
bobine qui vibre. (relevé de r sa résistance et de
I
V
Z=
son impédance d’où L son inductance)
•
01/04/2008
Découverte de la table de vibration : mesures à effectuer autour de l’amplificateur de puissance de cette table
Vs/Ve en fonction de la fréquence pour un niveau de tension d’entrée imposé.
(chaque groupe d’élève mesure et relève une courbe)
•
08/04/2008 et 15/04/2008
Recherche par groupe, à l’aide d’internet, d’un système permettant de visualiser sous la forme d’une tension le
déplacement de la table de vibration. Le système ne devra pas provoquer de frottements pour la table.
( le but de ce travail est de pouvoir vérifier la linéarité de réponse de la table à la sollicitation de tension qu’on
lui impose)
•
06/05/2008
Exposé oral : chaque groupe d’élèves doit exposer :
1. la problématique des tremblements de terre ;
2. commenter son relevé de mesures sur l’amplificateur de puissance ;
3. proposer sa solution pour mesurer la position de la table de vibration en fonction de la tension
qui la sollicite.
•
13/05/2008 et 20/05/2008
Comment piloter la table de vibration à l’aide du logiciel Regressi ? Peut-on injecter le relevé réel d’un
tremblement de terre dans notre table de vibration ?
•
27/05/2008 et 03/06/2008
Etudier le ou les principes pour détecter une vibration : utilisation de capteurs d’accélération.
En parallèle avec l’étude du projet, deux ou trois groupes d’élèves seront pris en charge par Monsieur CHIMIE
technicien de laboratoire pour aller faire des mesures de « sons » (à l’aide d’un sonomètre) et
« d’éclairements » (à l’aide d’un luxmètre et d’un capteur solaire) à travers le lycée, comme le montre le
calendrier ci-dessus.
NOM EXPOSE
ORAL
par GROUPE
Découverte
SONOMETRE
Découverte
LUXMETRE
PROJET
BOUKHRISS Amal
06/05/2008
CAVAILLON Yoann
8h10 8h25
CORTES Christian
06/05/2008
COULOMBIE Yoann
8h35 8h50
01/04/2008
ELASRI Aissa
06/05/2008
GACEM Yacine
9h00 9h15
13/05/2008
GERMANY Jeffrey
06/05/2008
ZHENG Haifan
9h25 9h40
JUFF DOS SANTOS Bryand
06/05/2008
OUNZAB Omar
10h10 10h25
SAFRAOU Ouissem
06/05/2008
GUERVIL Florent
10h35 10h50
08/04/2008
20/05/2008
Du 25/03/2008 à la fin de l’année
scolaire

Jean-Yves GANCEL
5/6
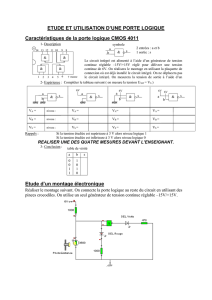
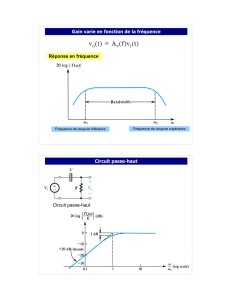
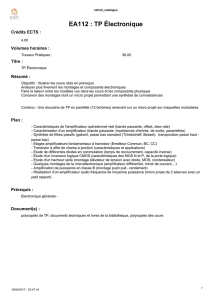
ANNEXE N°2 « Comment réaliser la partie amplificateur de puissance ? »
Schéma de l’amplificateur de puissance
TL 082 TL 082
+ 15V
- 15V
M asse
M asse
Masse
Sor t i e
Ent r ée
+ 15V commandé
- 15V cmmandé
Dar lington NPN
Dar lingt on PN P
Résistance 1 ohm
20W
20W
Résistance 1 ohm
220
220
22K
18K
18K
10K
10K
10K
10K
10K
22K
2,2K
330K
47K
68nF
68nF
68nF
68nF
100nF
100nF
100nF
100nF
10K
2,2K
100nF
680
680
di ode
puissance
di ode
puissance
2N 2907
2N 2222
2N1711
2N1711
Rouge
Rouge
Ver t e
Ver t e
+ 15V
- 15V
+
+
+
+
+ +
+
+
-
-
-
-
2,2K
2,2K
.
 6
6
1
/
6
100%