Une mise à jour est en cours de traduction. Version

Série 3731
Positionneur électropneumatique Ex d
Type 3731-3 avec communication HART®
Application
Positionneur Ex d à simple ou double effet pour montage sur
vannes de réglage pneumatiques. Adaptation automatique à la
vanne et au servomoteur.
Consigne 4 à 20 mA
Course nominale 3,6 à 200 mm
Angle de rotation 24 à 100°
Le positionneur détermine une position bien précise de la vanne
(grandeur réglée) correspondant au signal de commande
(grandeur directrice). Il compare le signal de commande
provenant d’un dispositif de réglage avec le déplacement
linéaire ou angulaire d’une vanne de réglage et émet comme
grandeur de sortie une pression d’air de commande.
Caractéristiques générales
• Adaptation simple sur les servomoteurs linéaires ou rotatifs
avec montage intégré SAMSON, profil NAMUR, sur colonne
selon IEC 60534-6-1 ainsi que sur les servomoteurs rotatifs
selon VDI/VDE 3845
• Position de montage indifférente
• Manipulation simple avec un seul bouton "tourner-pousser"
et un seul menu, même en atmosphère explosible
• Ecran à cristaux liquides clair et orientable
• Possibilité de configuration à partir d’un PC par liaison série
SSP à l’aide du logiciel TROVIS-VIEW
• Mise en service automatique avec quatre modes
d’initialisation différents
• Paramètres préréglés – seules les valeurs de paramètres non
standard doivent être réglées
• Capteur de déplacement calibré, à liaison directe, insensible
aux vibrations
• Grâce au mode d’initialisation "Sub" (Substitution), il est
possible, en cas d’urgence, de mettre le positionneur en
service pendant le fonctionnement de l’installation sans
déplacement de vanne.
• Sauvegarde de tous les paramètres dans une EEPROM
• Technique deux fils avec faible charge de 450 Ωà 20 mA
• Possibilité de limiter la pression de sortie
• Fonction de fermeture étanche réglable
• Surveillance en continu du point zéro
• Sonde de température et compteur de temps intégrés
• Autodiagnostic avec sortie défaut ou recopie de position
analogique
• Diagnostic étendu pour la version Expert+de l’appareil, se
reporter à la feuille technique T 8388 FR.
Exécutions
Positionneur i/p avec écran LCD, utilisable en zone explosible,
communication locale avec liaison série SSP,
fonction diagnostic EXPERT.
–Type 3731-3 Expert · Positionneur avec protocole de com-
munication HART®, fonctions diagnostic
–Type 3731-3 Expert+· Positionneur avec protocole de com-
munication HART®, fonctions diagnostic étendues.
Equipement supplémentaire (sur demande)
– Sortie binaire selon NAMUR – EN 60947-5-6 ou directement
sur automate, configurable comme contact seuil ou sortie
défaut.
–Recopie de position analogique avec transmetteur deux fils
–Electrovanne
Notice récapitulative T 8350 FR Edition Avril 2006
Feuille technique T 8387-3 FR
Fig. 1 · Positionneur électropneumatique Ex d
Type 3731-3 avec communication HART®
Une mise à jour est en cours de traduction.
Version réactualisée disponible en allemand et en anglais.

Mode de fonctionnement
Le positionneur, conçu pour être monté sur des vannes de
réglage pneumatiques, détermine une position bien précise de
la vanne (grandeur réglée x) correspondant au signal de
commande (grandeur directrice w). Il compare le signal
électrique de commande provenant d’un dispositif de réglage
avec le déplacement linéaire ou angulaire d’une vanne de
réglage, et émet comme grandeur de sortie une pression d’air.
Le positionneur est constitué essentiellement d’un capteur de
déplacement électrique (2), d’un module i/p analogique (6)
avec amplificateur (7) et d’un microprocesseur (5).
Lorsqu’il y a écart de position, la pression d’air est augmentée
ou diminuée pour rétablir la position. Il est possible de limiter
par logiciel la pression de commande vers le servomoteur à 1,4
bar, 2,4 bars ou 3,7 bars .
Le limiteur de débit à consigne fixe (9) permet d’obtenir un débit
d’air constant qui sert d’une part à balayer l’intérieur de
l’appareil et d’autre part à optimiser l’amplificateur de débit
d’air de sortie. Le signal de commande du module i/p (6) est
alimenté par le réducteur de pression (8) pour éviter les
incidences de la variation de pression de l’alimentation de
l’appareil.
Possibilité d’utilisation en atmosphère explosible
Bouton d’utilisation et écran directement accessibles sans
ouverture de boîtier, ce qui garantit la possibilité d’une
utilisation en zone explosible.
Un concept à un seul bouton "tourner-pousser" très facile à
utiliser a été développé pour manipuler l’appareil. Les
paramètres sont sélectionnés en tournant le bouton, le pas
souhaité est activé en appuyant sur le bouton. Le menu est
structuré de telle sorte que tous les paramètres se succèdent sur
un seul niveau afin d’éviter la recherche dans des sous-menus.
Tous les paramètres peuvent être consultés localement et
modifiés.
Les données sont affichées sur un écran à cristaux liquides qui
peut être pivoté de 180°.
Pour la configuration avec le logiciel TROVIS-VIEW, le
positionneur est équipé d’une connexion numérique reliée à la
liaison série RS-232 du PC (hors zone Ex).
Tous les paramètres sont accessibles par communication
HART ®
2T 8387-3 FR
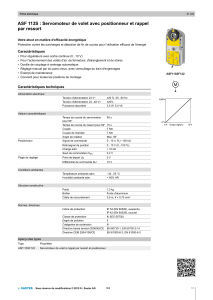
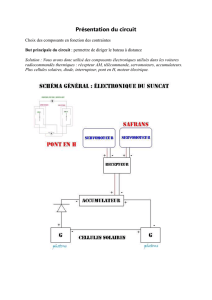
Fig. 2 · Schéma de principe du positionneur type 3731-3 Ex d
Légende
1 Vanne
2 Capteur de déplacement
3 Régulateur PD
4 Convertisseur A/D
5 Microprocesseur
6 Convertisseur i/p
7 Amplificateur pneumatique
8 Réducteur de pression
9 Limiteur de débit
13 Recopie de position (option)
16 Ecran LCD
17 Commande électrovanne (option)
19 Convertisseur DA
20 Liaison série (SSP)
21 Communication HART®
22 Bouton "tourner-pousser"
23 Sortie binaire configurable
Enveloppe Ex d

3T 8387-3 FR
Tableau 1 · Caractéristiques techniques
Positionneur type 3731-3
Course nominale Montage intégré sur servomoteur type 3277 : 3,6 à 30 mm
Montage selon IEC 60 534-6-1 : 3,6 à 200 mm
Servomoteurs rotatifs : 24 à 100° (déplacement angulaire)
Plage de course Réglable Dans les limites de la course/angle nominal · rapport maximal 1/5 possible.
Grandeur
directrice w Plage de signal 4 à 20 mA · 2 fils, polarité indifférente · échelle minimum 4 mA
Seuil de destruction 40 V · limitation alimentation interne 60 mA
Courant minimum 3,6 mA pour l’affichage · 3,8 mA pour le fonctionnement
Tension de charge ≤9 V correspond à 450 Ωpour 20 mA
Communication
Communication locale Liaison série SSP SAMSON et adaptateur interface série
Configuration logiciel requise (SSP) TROVIS-VIEW module de données 3731-3
Communication HART®Protocole de communication HART®
Impédance de la plage de fréquence: réception env. 455 Ω, émission env. 185 Ω
Configuration
Logiciel
(HART®)
Pour console
portable Description appareil (DD) pour type 3731-3
Pour PC Données DTM selon spécification 1.2, appropriées pour intégration dans des applications supportant le
concept FDT/DTM (par exemple PACTware);
Intégration AMSTM Suite en préparation.
Air Pression 1,4 à 6 bars (20 à 90 psi)
Qualité d’air selon
ISO 8573-1
Edit. 2004
Taille et épaisseur maximale des particules : classe 4 · Teneur en huile : classe 3
Le point de rosée doit être situé 10 K en dessous de la valeur de température ambiante minimum.
Pression de sortie 0 bar à la pression d’alimentation · limitation possible par logiciel à 1,4 bar/2,4 bars/3,7 bars ±0,2 bar
Caractéristique Linéaire/exponentielle/exponentielle inverse
Vanne papillon, vanne à clapet rotatif ou vanne à segment sphérique : linéaire/exponentielle
Définie par l’utilisateur : réglable par logiciel
Ecart ≤1 %
Hystérésis ≤0,3 %
Sensibilité ≤0,1 %
Temps de course Pour ouverture et fermeture séparées, réglables par logiciel jusqu’à 240 s .
Sens de déplacement Réversible
Consommation d’air, stationnaire Selon l’alimentation environ 110 ln/h
Débit d’air Admission Pour Δp = 6 bars : ≥8,5 mn3/h · pour Δp = 1,4 bar: ≥3,0 mn3/h · KVmax (20 °C) = 0,09
Purge Pour Δp = 6 bars : ≥14,0 mn3/h · pour Δp = 1,4 bar: ≥4,5 mn3/h · KVmax (20 °C) = 0,15
Température ambiante admissible –40 à +80 °C · voir également certificat de conformité.
Influences Température ≤0,2 %/10 K
Alimentation Aucune
Influence des
vibrations ≤0,25 % à 2000 Hz et 4 g selon IEC 770
Compatibilité électromagnétique Répond aux exigences des normes EN 61 000-6-2, EN 61 000-6-3 et NE 21.
Raccordements électriques 2 taraudages ½ NPT ou au choix M20 x 1,5, bornes à visser pour section 2,5 mm²
Mode de protection IP 66 / NEMA 4X
Protection contre l’explosion
ATEX : II 2 G EEx d IIC T6, T5 ou T4 / EEx de IIC T6, T5 ou T4 / II 2 D IP 65 T 80 °C
FM/CSA : XP/I/1/BCD/T4...T6 ; XP/I/1/IIB+H2/T4...T6 ; Type 4X/IP66
Matériaux
Corps Fonte d’aluminium GD AlSi12 selon DIN 1725 (3.2582) · chromaté et revêtu époxy
Pièces externes Acier inoxydable 1.4301/1.4305/1.4310
Poids Env. 2,5 kg

Montage du positionneur
Le positionneur type 3731-3 est monté directement sur les
vannes avec servomoteur SAMSON de type 3277, sur les
vannes de réglage avec arcades moulées ou à colonne selon
IEC 60534-6 (NAMUR) ou sur les servomoteurs rotatifs selon
VDI/VDE 3845.
Les pièces de montage et accessoires nécessaires sont référen-
cés dans la notice de montage et de mise en service
EB 8387-3 FR.
Montage intégré
Le positionneur peut être monté directement sur le servomoteur
de type 3277, à l’aide d’un bloc de liaison. Pour les servomo-
teurs avec position de sécurité "Tige sort par ressorts" et pour le
type 3277-5 (120 cm²) la pression de commande est transmise
au servomoteur par un perçage interne effectué dans l’arcade.
Pour les servomoteurs avec position de sécurité "Tige entre par
ressorts" et des surfaces supérieures ou égales à 240 cm2,la
pression de commande est transmise au servomoteur par une
conduite externe à réaliser.
Montage selon IEC 60534-6 et NAMUR
L’appareil peut également être fixé sur l’arcade par une équerre
NAMUR selon IEC 60534-6-1 et recommandation NAMUR,
indifféremment de part et d’autre de la vanne.
Montage sur servomoteurs rotatifs
Pour le montage sur servomoteurs rotatifs selon VDI/VDE 3845,
le positionneur est monté en utilisant un adaptateur et une entre-
toise.
Pour les servomoteurs rotatifs SAMSON type 3278 et VETEC
types S160 et R, un kit de montage commun est disponible.
4T 8387-3 FR
Option sortie binaire Contact logiciel configurable avec séparation galvanique
Au choix : contact NAMUR EN 60947-5-6 ou contact sur basse tension pour automate
Fonctionnement au choix : contact de position ou sortie défaut
Etat du signal Bornes B-C
Sortie AC/DC (automate) Bornes A-B
Conducteur /tension résiduelle < 1,7 V Non conducteur ≥2,1 mA
Non conducteur / résistance élevée, I < 100 μA Conducteur ≤1,2 mA
Tension de service Puissance : 40 V DC / 28 V AC / 0,3 A
Seuil de destruction : 45 V DC / 32 V AC / 0,4 A Uniquement pour raccordement sur amplificateur
NAMUR selon EN 60 947-5-6
Option électrovanne Séparation galvanique
Entrée 0 à 40 V DC/0à28VAC,seuil de destruction 45 V DC / 32 V AC, résistance d’entrée ≥7kΩ
Signal Position de sécurité pour tension d’entrée ≤3 V Fonctionnement normal pour tension d’entrée > 5 V
Option recopie de position Convertisseur deux fils
Alimentation 11 à 35 V DC, protégé contre l’inversion de polarité, seuil de destruction 45 V DC
Signal de sortie 4 à 20 mA
Sens d’action Réversible
Plage de travail –1,25 à 103 % de la course nominale, soit 3,8 à 20,5 mA
également au choix indication de défauts 2,4 mA ou 21,6 mA selon NAMUR NE 43
Caractéristique Linéaire
Hystérésis et influence HF Identiques au positionneur
Autres influences Identiques au positionneur
Certificats protection Ex
Type d’homologation N° d’homologation Date Remarques
Attestation d’examen CE de
type PTB 05 ATEX 1058 19.07.2005 II 2 G EEx d IIC T6
II 2 G EEx de IIC T6
II2D IP65T80°C
Homologation FM 3024956 30.01.2006 XP/I/1/BCD/T4 Ta=80 °C, T5 Ta=70 °C, T6 Ta=60 °C ; Type 4X/IP66
XP/I/1/IIB+H2/T4 Ta=80 °C, T5 Ta=70 °C, T6 Ta=60 °C ; Type 4X/IP66
DIP/II, III/1/EFG/T4 Ta=80 °C, T5 Ta=70 °C, T6 Ta=60 °C ; Type 4X/IP66
Classe I, Division 1 et 2, groupes B, C, D
Classe II et III, Division 1 et 2, groupes E, F, G
Classe I, Zone 1, IIB+H2; Type 4X/IP66
Homologation CSA 1709815 04.10.2005 Classe 2258-02 :
Classe I, Division 1 et 2, groupes B, C, D, T6...T4
Classe II, Division 1 et 2, groupes E, F, G ; Classe III
Classe I, Zone 1, groupe IIB+H2, T6...T4 ; Type 4X/IP 66
Homologation NEPSI GYJ06172 24.01.2006 Ex d IIC T4-T6/Ex de IIC T4-T6 ; valable jusqu’au 23.01.2011

5T 8387-3 FR
70
15
46
34
58
A
1
Z
A
2
56
86
130
80
166
30
86
Ø 101
76
50
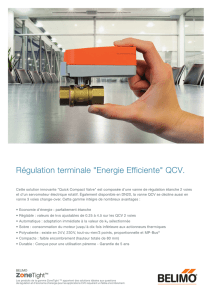
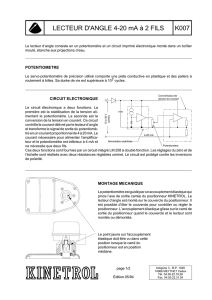
Dimensions mm
Montage intégré
Montage selon IEC
60534-6 et NAMUR
Bloc manomètres ou plaque de raccordement
¼ NPT ou G ¼ (seulement pour G ¼)
Levier
S = 17 mm, M = 50 mm
L = 100 mm, XL = 200 mm
Montage sur
servomoteurs rotatifs
Sortie A1 Alimentation (9)
Amplificateur Sortie A2
inverseur
¼ NPT ou
G ¼
2 x taraudages
½ NPT ou M20 x 1,5
¼ NPT
 6
6
1
/
6
100%