Série 3725 Positionneur électropneumatique type 3725

Série 3725
Positionneur électropneumatique type 3725
Application
Positionneur simple effet pour montage sur vannes de réglage
pneumatiques linéaires et rotatives. Adaptation automatique à
la vanne et au servomoteur.
Grandeur directrice 4 à 20 mA
Courses 3,75 à 50 mm
Angle de rotation 24 à 100°
Le positionneur détermine une position bien précise de la vanne
(grandeur réglée x) correspondant au signal de commande
(grandeur directrice w). Il compare le signal de commande
provenant d’un dispositif de réglage ou de pilotage avec la
course ou l’angle de rotation et émet comme grandeur de sortie
y une pression d’air pneumatique.
Caractéristiques générales
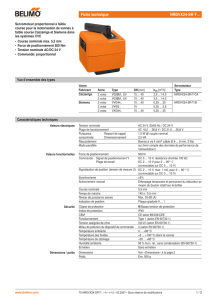
• Montage direct simple sur les servomoteurs SAMSON type
3277 (120 à 700 cm², voir Fig. 1)
• Montage selon NAMUR, CEI 60534-6-1
• Montage sur servomoteurs rotatifs selon VDI/VDE 3845 (voir
Fig. 3)
• Montage sur les servomoteurs type 3372 de la série V2001
(voir Fig. 2)
• Utilisation simple avec une navigation dans le menu à l’aide
de trois touches capacitives
• Ecran à cristaux liquides orientable pour une bonne lisibilité
dans chaque position de montage
• Mise en service automatique configurable
• Paramètres préréglés - seules doivent être réglées les valeurs
de paramètres non standards
• Sauvegarde fiable de tous les paramètres dans une EEPROM
•Pilotage 4-20 mA (signal actif), faible charge ohmique 300 Ω
• Fonction fermeture étanche configurable
• Contrôle continu du point zéro
• Système de mesure de déplacement sans contact
• Résistant aux influences extérieures et coups de bélier
Exécution
–Type 3725 · Positionneur i/p avec écran à cristaux liquides
configurable localement
Notice récapitulative T 8350 EN Edition Décembre 2011
Feuille technique T 8394 FR
Fig. 1
Type 3725, montage direct
sur servomoteur type 3277
Fig. 3
Type 3725, montage sur servomoteur
rotatif selon VDI/VDE 3845
Fig. 2
Type 3725, montage sur
servomoteur type 3372

Fonctionnement
Le positionneur, conçu pour être monté sur des vannes de
réglage pneumatiques, détermine la position de la vanne (gran-
deur réglée x) par rapport au signal de commande (grandeur
directrice w). Il compare le signal de commande électrique
provenant d’un dispositif de réglage ou de pilotage avec la
course ou l’angle de rotation de la vanne et émet une pression
de commande (grandeur de sortie y) vers le servomoteur
pneumatique.
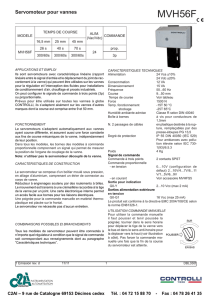
Le positionneur se compose essentiellement d’un capteur
magnétorésistif (AMR) (2), d’un module i/p analogique (6)
avec amplicateur en aval (7) et d’une carte électronique avec
microprocesseur de régulation (4).
La mesure de la course ou de l’angle de rotation est effectuée au
moyen d’un levier de course externe, relié à un aimant situé à
l'intérieur de l’appareil et donc au capteur magnétorésistif,
appelé capteur AMR (magnétorésistance anisotrope) et la carte
électronique placée en aval.
En cas d’écart de position, la pression d’air est augmentée ou
diminuée dans le servomoteur. Si nécessaire, la modification de
pression de commande peut être ralentie par l’utilisation d’une
restriction de débit Q intégrée.
Le module i/p (6) est alimenté avec une pression amont
constante par le régulateur de pression (8) afin d’éviter les vari-
ations de pression d’alimentation.
Utilisation
Cet appareil peut être configuré à l’aide de touches tactiles très
faciles à utiliser : les paramètres sont sélectionnés en effleurant
les deux touches des extrémités et les réglages souhaités sont
ensuite validés en effleurant la touche du milieu. Le menu est
structuré de telle sorte que tous les paramètres se succèdent sur
un seul niveau. Ceci évite la recherche dans des sous-menus.
Tous les paramètres peuvent être consultés et modifiés
localement.
Les informations sont affichées sur un écran à cristaux liquides
orientable à 180°.
2T 8394 FR
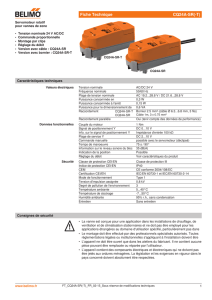
Fig. 4 · Schéma de principe du positionneur type 3725
Légende
1 Vanne de réglage
2 Capteur magnétorésistif AMR
3 Convertisseur A/D
4 Microprocesseur
5 Convertisseur D/A
6 Module i/p
7 Amplificateur de débit d'air
8 Régulateur de pression
9 Restriction fixe
10 Restriction de débit
11 Affichage

3T 8394 FR
Tableau 1 · Caractéristiques techniques
Positionneur type 3725
Course réglable Montage direct sur servomoteur type 3277 : 3,75 à 30 mm
Montage selon NAMUR, CEI 60534-6-1 : 3,75 à 50 mm
Montage sur servomoteur type 3372 : 15/30 mm
Montage sur servomoteurs rotatifs : 24 à 100°
Grandeur directrice w Plage de signal 4 à 20 mA · protection à l’inversion des polarités
Plage Split range 4 à 11,9 et 12,1 à 20 mA
Seuil de destruction ±33 V
Courant minimum 3,8 mA
Tension de charge ≤6 V (correspond à 300 Ωpour 20 mA)
Energie auxiliaire Alimentation d’air 1,4 à 7 bars (20 à 105 psi)
Qualité de l’air
selon la norme
ISO 8573-1:2001
Taille et épaisseur maximale des particules : classe 4 · Teneur en huile : classe 3
Point de rosée : classe 3 ou au moins
10 K en dessous de la plus faible température ambiante prévue.
Pression de commande (sortie) 0 bar jusqu’à la pression d’alimentation · Limitation à environ 2,4 bars possible par configuration
Caractéristique au choix 3 caractéristiques pour vanne linéaire · 9 caractéristiques pour vanne rotative
Hystérésis ≤0,3 %
Sensibilité ≤0,1 %
Sens d’action w/x réversible
Consommation d’air ≤100 ln/h pour une pression d’alimentation jusqu’à 6 bars et une pression de commande de
0,6 bar
Débit d’air Admission pour Δp = 6 bars : 8,5 mn³/h · pour Δp = 1,4 bar : 3,0 mn³/h · KVmax (20 °C) = 0,09
Purge pour Δp = 6 bars : 14,0 mn³/h · pour Δp = 1,4 bar : 4,5 mn³/h · KVmax (20 °C) = 0,15
Température ambiante admissible –25 à +80 °C
Pour les appareils à sécurité intrinsèque, voir également les valeurs limites sur les certificats d’essai.
Influences Température ≤0,15 %/10 K
Energie auxiliaire Aucune
Influence des vibra-
tions ≤0,25 % jusqu’à 2000 Hz et 4 g selon la norme CEI 770
Compatibilité électromagnétique Répond aux exigences des normes EN 61 000-6-2, 61 000-6-3 et NE 21
Raccordements électriques 1 passage de câble M20 x 1,5 pour câble de 6 à 12 mm
Bornes à ressorts pour diamètre de fil 0,2 à 1,5 mm²
Protection sécurité intrinsèque Voir le tableau des certificats d’homologation Ex délivrés
Mode de protection IP 66
Matériaux
Corps Polyphtalamide (PPA)
Capot Polycarbonate, transparent
Pièces externes Acier inoxydable 1.4571 et 1.4301
Passage de câble Polyamide, noir, M20 x 1,5
Poids Env. 0,5 kg

Montage du positionneur
Le positionneur i/p type 3725 peut être monté directement sur
un servomoteur type 3277 à l’aide d’un bloc de liaison. Sur les
servomoteurs type 3277-5 (120 cm²), la pression de
commande est amenée dans le servomoteur au moyen d’un
perçage interne dans l’arcade de servomoteur. Sur les
servomoteurs avec position de sécurité "tige de servomoteur
entre par ressort" et des surfaces actives à partir de 240 cm², la
pression de commande est amenée dans le servomoteur par
l’intermédiaire d’une liaison tubulaire externe.
Texte de commande
Positionneur type 3725
– sans barrette de raccordement pneumatique (seulement pour
montage direct sur type 3277)
– montage direct sur servomoteur type 3277 (120 à 700 cm²)
– montage selon NAMUR, CEI 60534-6-1
– montage sur servomoteurs pour vanne rotative selon
VDI/VDE 3845
– montage sur servomoteur pour vanne rotative type 3278
(160/320 cm²)
– avec barrette de raccordement pneumatique G ¼
– avec barrette de raccordement pneumatique ¼ NPT
– sans/avec manomètre jusqu’à 6 bars max.
T 8394 FR
2012-02
SAMSON REGULATION S.A Succursales à:
1, rue Jean Corona - BP 140 Paris (Rueil-Malmaison)
F- 69512 VAULX-EN-VELIN CEDEX Marseille (La Penne sur Huveaune)
Tél. +33 (0)4 72 04 75 00 Fax +33 (0)4 72 04 75 75 Mulhouse (Cernay) · Nantes (St Herblain)
Internet: http://www.samson.fr Bordeaux (Mérignac) · Lille ·Caen
Certificats d'homologation Ex délivrés
Type de certificat N° de certificat Date Remarque
Déclaration CE de conformité PTB 11 ATEX 2020X 25.08.2011 II 2 G EEx ia IIC T4
Code article
Positionneur Type 3725- xxxx00000009999
avec écran à cristaux liquides et Autotune, grandeur directrice 4 … 20 mA
Protection Ex (D'autres certificats sont en préparation)
sans 000
II 2 G Ex ia IIC T4 selon ATEX 1100
14
22
M 20x1,5
157,5
108
87
42
21
62,50
25
Dimensions en mm
1
/
4
100%