Chapitre IV Sismomètres

R. Pillet, Chapitre IV, sismomètres Page 1
22 mars 2013
Chapitre IV
Sismomètres
--------------
Nous avons vu aux chapitres précédents le fonctionnement de la partie mécanique des
sismomètres. La mesure de la position de la masse par rapport au châssis a simplement été
évoquée et nous allons voir dans ce chapitre les différentes méthodes qui sont (ou furent)
employées par les sismologues. Ce très faible déplacement entre la masse d’inertie et le
châssis doit être mesuré et amplifié et les méthodes ne manquent pas. La mesure de la
position de la masse par rapport au châssis est réalisée par le transducteur qui va, en général,
transformer ce déplacement en tension électrique. Dans ce chapitre, nous passerons en
revue les méthodes les plus classiques.
4.1 transducteurs
Un transducteur est un élément qui va transformer le mouvement de la masse d’inertie en une
grandeur mesurable (tension électrique, en général) qui pourra être amplifiée, enregistrée et
sur laquelle les sismologues pourrons travailler.
Au début du siècle, les sismologues utilisent des tringles judicieusement installées qui
permettent une amplification du déplacement de la masse d’inertie par rapport au châssis.
L’enregistrement se fait avec un stylet sur un papier noirci au noir de fumée (figure 4.1). Le
papier est fixé sur un cylindre en rotation (~1 tour par heure) qui se déplace latéralement
d’environ 1 cm par tour, permettant ainsi l’écriture du signal sismique sur une hélice. Ce
système permet généralement l’enregistrement continu pendant 24 heures et, après déroulage
du papier, fixation du noir de fumée à l’aide de gomme arabique diluée dans du pétrole et
séchage, le sismogramme est utilisable et permet la lecture des temps d’arrivée des différentes
ondes sismique (figure 4.2). L’information de l’heure (top horaire ou minute) est inscrite sur
le sismogramme par une marque appliquée au stylet. Le frottement engendré par les tringles
est compensé par l’utilisation d’une masse très importante. Par exemple, les sismomètres
horizontaux Mainka avaient une masse de plusieurs centaines de kg (http://eost.u-
strasbg.fr/musee/sism/ mainka.html).

R. Pillet, Chapitre IV, sismomètres Page 2
Figure 4.1. Exemple d’un enregistrement sur ‘noir de fumée’. Sismogramme du 24 décembre
1969 (12h00) au 26 décembre 1969 (12h00), emprunté aux archives de l’Observatoire
Volcanologique et Sismologique de la Martinique.
Figure 4.2 Reproduction (zoom) d’un sismogramme enregistré sur un tambour. Chaque
minute est marquée par un créneau délivré par une horloge interne. Dans ce cas, il ne s’agit
pas d’un stylet qui écrit sur du noir de fumée, mais d’un stylo qui écrit sur du papier. Les
incidents d’écriture étaient fréquents avec un stylo à encre.
4.2 couple aimant/bobine
Par la suite, les sismologues utilisent le courant électrique crée par un fil conducteur qui se
déplace dans un champ magnétique. Une bobine est constituée d’un enroulement sur un
cylindre de plusieurs centaines de tours d’un fil très fin isolé par un vernis. Elle se déplace
sans frottement dans l’entrefer d’un aimant (figure 4.3) qui produit un champ magnétique
radial, constant et homogène. Ce capteur est un capteur de vitesse car la tension électrique
crée est de la forme : avec la tension V en volts, la vitesse de déplacement de la
bobine en m/s et , coefficient du couple aimant/bobine en V/m/s.

R. Pillet, Chapitre IV, sismomètres Page 3
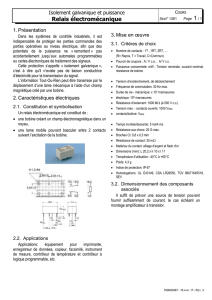
Figure 4.3. Schéma d’un couple aimant/bobine. La bobine se déplace dans le champ radial
fourni par un aimant permanent.
Une très petite partie du courant créée par le mouvement sismique est envoyée sur un
galvanomètre à cadre mobile très sensible qui produit une déviation proportionnelle à cette
intensité. Le galvanomètre porte un miroir qui renvoie un rayon lumineux sur une échelle
graduée (méthode de Poggendorf). En sismologie, le rayon lumineux est renvoyé sur un
papier photo attaché à un cylindre en rotation (~1 tour par heure) qui se déplace latéralement
d’environ 1 cm par tour, permettant ainsi l’inscription lumineuse du signal sismique sur une
hélice. Après développement du papier photographique et séchage, le sismogramme est
utilisable. Un galvanomètre à cadre mobile est constitué d’une bobine plate de très faible
impédance qui tourne proportionnellement à l’intensité du courant qui le traverse, dans le
champ magnétique d’un aimant permanent. C’est donc le même principe de fonctionnement
que le transducteur du sismomètre et la connexion de ces deux systèmes est délicate. Par
contre l’utilisation d’un galvanomètre très longue période permet d’augmenter notablement
les périodes enregistrées par le sismomètre, et d’élargir ainsi la bande passante (figure 4.4).
Figure 4.4 Représentation de la bande passante d’un sismomètre longue période (Ts=15 s)
couplé à un galvanomètre à cadre mobile de période propre Tg égale à 90 secondes. La bande
passante s’en trouve élargie vers les longues périodes de la sismologie et permet de mieux
voir les ondes de surface (Rayleigh et Love).
Le papier photo coute très cher et l’avènement des magnétophones dédiés à l’enregistrement
des fréquences vocales a permis de faire les premiers enregistrements sur bande magnétique.
L’enregistrement du séisme devenait ainsi réutilisable. Une fréquence porteuse de la gamme

R. Pillet, Chapitre IV, sismomètres Page 4
audio (20-20 000 Hz) de quelques kHz est modulée par le signal sismique qui modifie cette
fréquence en fonction de sa tension. Le signal modulé est enregistré sur le magnétophone. A
la relecture, le signal sismique est démodulé (modulateur et démodulateur de la marque
Lennartz) et restitué au travers d’une tension électrique utilisable sur des traceurs à papier
(type servotrace de chez Sefram, figure 4.5). Entre le démodulateur et le traceur, on peut
mettre un filtre analogique qui va permettre de faire apparaître les différentes composantes
fréquentielles du signal. L’autonomie des magnétophones à bandes (Revox ou Uher, le plus
souvent, puis magnétophone à cassette par la suite) est de 4 heures au maximum et ne permet
pas un enregistrement continu. Un détecteur de seuil compare les amplitudes du signal avec
un seuil fixé par l’opérateur. Pour ne pas perdre le début du signal, il faut utiliser deux
magnétophones qui enregistrent à tour de rôle des périodes d’environ ¼ d’heure. Si le
détecteur indique un séisme, la bande n’est pas rembobinée.
Figure 4.5 Photo d’un enregistreur analogique servotrace monotrace de chez Sefram. Le
défilement du papier est réglable d’environ 1 mm/minute à 1 cm/seconde. Le papier sort au
niveau de la barre centrale brillante, munie de trois galets noirs, et descend vers le bas de la
photo. La plume, fixée à un chariot (situé en dessous de l’inscription ‘servotrace’) a une
amplitude d’environ 20 cm.
Les acquisitions MEQ-800 de Sprengnether de petite dimension, légère, de faible
consommation, autonome, peuvent s’installer facilement dans des sites démunis
d’infrastructure. Deux batteries d’automobile permettent une autonomie de plus d’une
semaine. Il faut, malgré tout, aller chaque jour changer le tambour d’enregistrement. Ces
caractéristiques ont permis l’essor des campagnes de micro-sismicité, c'est-à-dire l’étude de la
sismicité d’une petite zone à partir d’un réseau très dense.

R. Pillet, Chapitre IV, sismomètres Page 5
Figure 4.6 Exemple d’enregistrements sismiques, enregistrés sur bandes magnétiques,
‘rejoués’ sur un traceur ‘Sefram’ à 12 voies.
Figure 4.7 Enregistreur Belin 3 composantes (à gauche) était utilisé avec du papier photo et
3 galvanomètres à cadre mobile. Sur cette photo, on le voit modifié pour une écriture avec un
stylo. A droite de la photo, un enregistreur MEQ-800.
Le transducteur constitué d’un couple aimant/bobine est un système réversible et si l’on
injecte un courant dans la bobine, une force proportionnelle à l’intensité du courant s’exerce
entre l’aimant et la bobine. Le coefficient de proportionnalité est le même que précédemment
et l’on peut écrire :
iF
avec la force F exprimée en Newton, l’intensité électrique qui
parcours la bobine en Ampère et le coefficient du couple aimant/bobine en N/A. Ce
coefficient de forceur a la même valeur numérique que le coefficient de capteur, car 1 joule =
1 N.m = 1 V.A.s. En sismologie, la constante s’échelonne de 30 à 500 V/m/s ou N/A.
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
1
/
36
100%