Cours 01 – Introduction

1
Systèmes en temps réel 1
Cours #1
ELE-542
Systèmes ordinés en temps réels
Jean-Marc Beaulieu et Bruno De Kelper
Site internet: http://www.ele.etsmtl.ca/academique/ele542/
Systèmes en temps réel 2
Cours #1
Chapitre 1 – Introduction et concepts de base
Agenda
Brève présentation personnelle
Introduction
Présentation du syllabus
Projet de session
Organisation du cours
Définition et concepts

2
Systèmes en temps réel 3
Cours #1
Qu’est-ce qu’un systèmes ordinés en temps réel
(S.O.T.R.)?
CPU
Mémoire
E/S
Système Ordiné ?
•Comprend un CPU, de la mémoire, un programme,
des périphériques, des E/S
Temps réel ?
•Obligation de répondre à un événement à l’intérieur
d’un intervalle de temps borné Temps de réponse
•Aspect temporel crucial, sinon danger
Systèmes en temps réel 4
Cours #1
Exemple de système en temps réel
Le système de navigation « fly-by-wire »
CPU
Signaux des
différents capteurs,
- accéléromètres
- gyroscopes
- commande du pilote
- température
- radar
Affichage des calculs de
- position
- température
Commande
- des moteurs
- volets.
Il s’agit aussi d’un système embarqué

3
Systèmes en temps réel 5
Cours #1
Mémoire
Problématique centrale du cours
Quel est le temps de réponse du système?
Corollaires:
•Quelles sont les stratégies pour réduire le temps de réponse?
•Comment accélérer le traitement?
Quels sont les facteurs que déterminent ce temps de
réponse (temps de traitement)?
CPU
Logiciel de
l'application
Compilation
Entrée
Sortie
Systèmes en temps réel 6
Cours #1
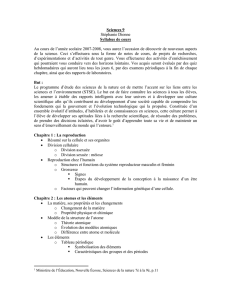
Modèle du système -- Architecture en couches
Couche Matérielle
Processeur + Mémoire + E/S
Jeu d'instructions
Langage assembleur
Langage de programmation
Langage + Compilateur
Système
d'exploitation
Couche application
code source
Aspects logiciels
Aspects matériels

4
Systèmes en temps réel 7
Cours #1
Présentation du cours et du syllabus
Description sommaire
•Initiation aux systèmes embarqués et S.T.R
•Révision de la structure matérielle
•Performance et le temps de réponse du système
•Aspects logiciels:
Programmation de bas niveau (en C et pas d’assembleur)
Traitement des interruptions et entrées-sorties
Programmation concurrente
•Principaux éléments des noyaux en temps réel
Structure et services – Ordonnancement
•Fiabilité
Systèmes en temps réel 8
Cours #1
Présentation du cours et du syllabus
Description sommaire (suite)
•Utilisation du langage C
•Compilateur mixte [Cross-compiler]
Laboratoire
•Réaliser un système impliquant deux ordinateurs :
Un ordinateur PC
Un microcontrôlleur AVR de Atmel.

5
Systèmes en temps réel 9
Cours #1
Présentation du cours et du syllabus
Objectifs
•Réaliser des systèmes satisfaisant aux contraintes
matérielles et logicielles associées au traitement des
évènements en temps réel.
•Comprendre l’opération des microcontrôleurs et des
ordinateurs utilisés dans les systèmes temps réel.
•Comprendre l’opération des systèmes d’exploitation et
savoir les utiliser dans le développement de SOTR.
•Développer et programmer un système embarqué en temps
réel qui fait fonctionner un robot mobile.
•Choisir une technique de conception sécuritaire pour les
SOTR.
Réf. : Plan de cours
Systèmes en temps réel 10
Cours #1
Présentation du cours et du syllabus
Stratégie pédagogique
•Cours magistraux : 1 cours/semaine
•Laboratoires : 6 séances de 4 heures
•Note : Les cours sont d’une durée de 3 heures 30
minutes.
Contenu
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
1
/
21
100%