solutions

MESURES 718 - OCTOBRE 1999 61
SOLUTIONS
AUTOMATISMES
ENTRAÎNEMENTS À
MOTEURS ASYNCHRONES :
10 PIÈGES À ÉVITER
■ Nombreux sont ceux qui croient pouvoir caractériser rapidement une application et choisir tout aussi
rapidement l’association moteur/variateur adéquate. Mais un choix trop hâtif conduit souvent à surdi-
mensionner l’entraînement, ne serait-ce que pour se réserver une marge de sécurité. Dans d’autres cas,
on sous-dimensionnera l’entraînement, croyant faire ainsi des économies. En fait, il suffit de suivre
quelques règles relativement simples pour obtenir le bon compromis. Voici les recommandations
d’ABB sur la question.
L
e sur-dimensionnement d’un entraî-
nement se traduit par des dépenses
injustifiées, avec un surcoût à la fois à
l’achat (équipement trop puissant) et
en exploitation.
A l’inverse, un sous-dimensionnement de
l’entraînement peut créer en exploitation des
problèmes d’un coût bien supérieur aux éco-
nomies que l’on croyait faire à l’achat.
Pour éviter ces erreurs, il suffit de respecter
quelques principes simples.
1 - Ne vous trompez pas
de type de charge
Avant toute chose, il importe de connaître le
type de charge à entraîner. En vous trompant
de type de charge, vous pouvez surdimen-
sionner votre moteur et votre variateur et,
donc dépenser beaucoup plus que nécessai-
re. On distingue essentiellement trois types
de charge :
Charge à couple quadratique : applications
de pompage et de ventilation
Charge à puissance constante : un exemple
typique est l’enroulage/déroulage de produits
en bobines dont le diamètre varie.
Charge à couple constant : caractérise la plu-
part des autres applications. D’autres types de
charge existent, comme les charges à couple
linéaire, mais elles restent relativement rares.
Vous devez également connaître la vitesse à
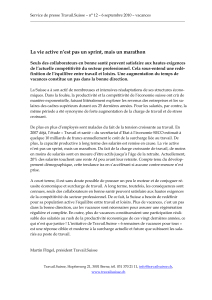
Pour bien choisir le
moteur et le varia-
teur de vitesse adap-
tés à l’application, il
faut d’abord bien
connaître son procé-
dé, le comportement
de la charge à entraî-
ner, la durée des
périodes de surchar-
ge, etc. Faute de
quoi, il en résultera
des surcoûts, tant au
moment de l’achat
que pendant
l’exploitation.
Doc. ABB

MESURES 718 - OCTOBRE 1999
62
SOLUTIONS
laquelle la puissance nominale est atteinte, de
même que les vitesses mini et maxi.
2 - Evitez de définir une vitesse
minimale trop basse
Vous devez connaître la plage de vitesses en
régime établi de votre application. Très sou-
vent, les utilisateurs définissent la vitesse nul-
le comme valeur de vitesse minimale, alors
même que la machine entraînée ne descend
jamais à ce niveau de vitesse. La vitesse nulle
est peut-être uniquement nécessaire au démar-
rage.
Prenons un exemple. Une extrudeuse fonc-
tionne dans la plage de vitesses de 300 à
1000tr/min. Si vous dimensionnez un
moteur pour une plage de vitesses de 0 à
1 000 tr/min, le refroidissement à basse vites-
se sera le facteur de limitation des perfor-
mances du moteur autoventilé, vous obligeant
à acheter un moteur plus puissant et donc plus
onéreux. Vous avez ainsi payé plus cher sim-
plement parce que vous avez négligé quelques
valeurs de base pour dimensionner votre
entraînement.
3 - Dans certains cas, une ventilation
forcée plutôt qu’une autoventilation
Choisir une ventilation forcée avec un petit
moteur peut donner la même capacité de
refroidissement qu’un moteur de plus grosse
puissance. Avec une ventilation forcée, vous
obtenez la même capacité de charge qu’au
point de fonctionnement nominal, car le
refroidissement est identique quelle que soit
la vitesse de rotation du moteur.
Toutefois, si vous choisissez un petit moteur
et décidez de lui adjoindre une ventilation
séparée (par exemple, un motoventilateur),
il vous en coûtera plus que si vous choisissiez
un moteur autoventilé de plus grosse puis-
sance.
4 - Définissez avec précision les temps
de cycle de fonctionnement
Lorsque vous déterminez les temps de cycle,
vous devez définir très précisément les
périodes de surcharge. Dans certains cas, vous
pourrez choisir un moteur plus petit, car le
temps de refroidissement est suffisant.
La constante de temps du variateur n’est que
de 4 à 6 minutes, ce qui signifie qu’il
s’échauffe et refroidit très vite. Ainsi, en défi-
nissant avec exactitude les périodes de sur-
charge, votre choix sera plus précis. Si la sur-
charge se prolonge au-delà de 10 minutes,
elle peut être considérée comme une charge
constante.
Dans les petits moteurs, la constante de temps
est de 15 minutes alors qu’elle peut atteindre
deux heures dans les gros moteurs. Pour ces
derniers, le temps de surcharge n’est pas un
critère de choix prioritaire.
5 - Bien choisir la classe
d’échauffement du moteur
Si rien ne justifie le choix de la classe d’échauf-
fement B, préférez la classe F. La classe
d’échauffement Bne doit être utilisée qu’avec
des intervalles de lubrification plus longs des
roulements ou si les contraintes d’environne-
ment imposent un moteur de température
plus faible pour des raisons de sécurité,
notamment dans les milieux exposés aux
risques d’explosion (industrie du pétrole et
du gaz, chimie et pétrochimie).
6 - Définissez correctement la plage
de vitesse en surcharge
Prenons l’exemple d’un four à ciment (appli-
cation à couple constant) : la surcharge est
uniquement appliquée au démarrage, le pro-
cédé lui-même ne connaît aucune surcharge.
Si vous ne connaissez pas bien votre procédé,
vous allez prévoir la même plage de vitesse
en régime établi qu’en surcharge, et vous ris-
quez de surdimensionner à la fois votre
moteur et votre variateur de vitesse.
En effet, si vous définissez des surcharges sur
toute la plage de vitesse, le critère de dimen-
sionnement de votre moteur sera la surchar-
ge requise à vitesse maxi. Il en résultera une
augmentation du courant dans la zone de
défluxage, du fait de la charge à couple
constant. Pour répondre à cette demande en
courant, vous allez choisir un variateur de
vitesse de calibre peut-être deux fois supé-
rieur à celui que vous auriez choisi si vous
aviez bien connu le niveau de surcharge.
Ce qu’il importe de retenir ici, c’est qu’il faut
bien connaître son application et son procédé
pour savoir exactement à quel moment les
surcharges sont appliquées et leur incidence
sur le dimensionnement de l’entraînement.
Il est alors possible de définir la fréquence des
surcharges.
b
a
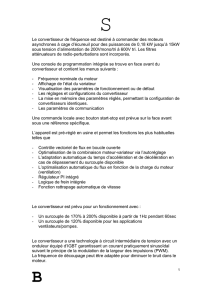
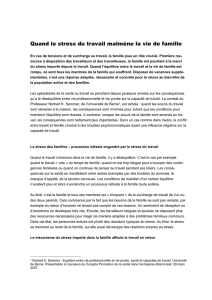
DIMENSIONNEMENT DU MOTEUR
C
Capacité de charge
en régime établi
Démarrage Moteur
b
plus
petit que moteur
a
1000
Charge en
régime établi
300
Critères de dimensionnement n (tr/min)
C
C
C
C
C
n
n
n
n
P
P
P
1. Couple constant
- Convoyeurs
- Extrudeuses
- Compresseurs
2. Couple quadratique
- Pompes
centrifuges
- Ventilateurs
3. Puissance constante
- Rouleaux
4. Puissance/couple
constants
- Bobineuses de
machine à papier
TYPE DE CHARGE A ENTRAÎNER
TYPE DE VENTILATION
Capacité de charge
en régime établi d'un
moteur autoventilé
Capacité de
charge en régime
établi d'un moteur
à ventilation forcée
C
Charge
n (tr/min)
Critère de dimensionnement
Avant de choisir un moteur ou un variateur, il
faut d’abord connaître le comportement de la
charge à entraîner.
Le moteur doit être précisément dimensionné
en fonction de la vitesse requise par le procé-
dé. Si vous spécifiez une plage de vitesses
partant de la vitesse nulle alors que votre pro-
cédé fonctionne entre 300 et 1000 tr/min,
vous surdimensionnez votre moteur.
Le moteur autoventilé est plus
puissant que le moteur à
ventilation forcée. Ce dernier
n’en est pas moins capable
d’entraîner la charge.

MESURES 718 - OCTOBRE 1999 63
SOLUTIONS
7 - Bien dimensionner
le variateur en fonction du moteur
Le courant nominal du moteur est différent
de son courant de charge, même si les deux
valeurs sont parfois égales.
Lorsque vous dimensionnez votre moteur,
vous appliquez normalement un facteur de
déclassement du fait, par exemple, du mode
de ventilation du moteur, de conditions
ambiantes (température et altitude), et parce
que la puissance des moteurs disponibles est
généralement supérieure à celle de vos besoins
réels. De même, la plage de vitesse peut être
différente des valeurs du catalogue pour un
démarrage direct.
Cela signifie que le courant moteur nominal,
mesuré à vitesse nominale et puissance nomi-
nale, n’est pas valable pour la plupart des cas.
Le courant de charge réel doit être calculé avec
la formule figurant en général dans la docu-
mentation technique des constructeurs de
variateurs de vitesse.
8 - Bien dimensionner le convertisseur
réseau (partie redresseur)
Lorsqu’une surcharge est appliquée au
moteur, elle est également appliquée à l’ondu-
leur car le courant correspondant doit être
fourni au moteur. Cela signifie que l’ondu-
leur doit être dimensionné en fonction des
surcharges, quelle que soit la vitesse.
Lors du dimensionnement du convertisseur
réseau, la puissance de sortie utile du moteur
doit donc être prise en compte car elle affec-
te directement la taille de ce convertisseur.
Cependant, sachant que la puissance est le produit
de la vitesse par le couple, une surcharge à basse
vitesse (démarrage) n’a aucune incidence sur le
convertisseur réseau.
Prenons un exemple. Si la plage de vitesse en régi-
me établi va de 200 à 1000 tr/min et qu’au démar-
rage il vous faut 250% de surcouple dans une pla-
ge de vitesses de 0 à 200 tr/min, quelle est la
capacité de surcharge requise?
P
surcharge
=250%.P
base
.(200/1000) = 0,5.P
base
base
.
120 %
110 %
100 %
90 %
80 %
70 %
60 %
50 %
40 % 0 0,2 0,4 0,6 0,8 11,2 1,4 1,6 1,8 2
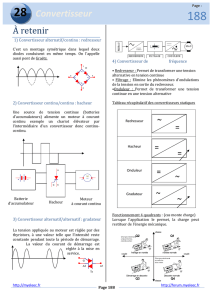
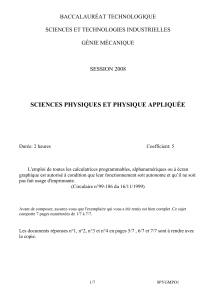
CHOIX DE LA CLASSE DE TEMPÉRATURE
Refroidissement
séparéClasse d’échauffement F
utilisée pour les moteurs
en classe B
Classe
d'échauffement B
Vitesse relative
C/Cn
Si rien ne justifie le choix de la
classe d’échauffement B, pré-
férez la classe F. La classe
d’échauffement B ne doit être
utilisée qu’avec des intervalles
de lubrification plus longs des
roulements ou si les
contraintes d’environnement
imposent un moteur de tem-
pérature plus faible pour des
raisons de sécurité.

MESURES 718 - OCTOBRE 1999
64
SOLUTIONS
Vous n’avez besoin, par conséquent,
d’aucune capacité de surcharge.
9 - La puissance du convertisseur
réseau varie avec la tension réseau
La puissance fournie par un convertisseur
réseau à diodes en montage hexaphasé est
donnée par la formule :
P
cc
=U
cc
.I
cc
= 1,35.U
n
.I
cc
.
Cela signifie qu’avec un convertisseur réseau
calibré 690 V fournissant 1000 kW, vous
n’obtiendrez pas la même puissance que si le
même convertisseur est alimenté par un réseau
660 V ou 575 V.
Pour disposer de plus de puissance avec un
niveau de tension inférieure, vous devez aug-
menter Icc (intensité du bus courant continu)
ce qui vous oblige parfois à opter pour un
convertisseur réseau de calibre supérieur.
En cas de creux de tension réseau, la puissan-
ce de sortie utile du convertisseur réseau sera
également affectée.
Vous risquez alors de sous-dimensionner le
convertisseur réseau.
10 - Les creux de tension jouent sur le
couple de décrochage du moteur
Le couple maximum du moteur est donné par :
C
b
=0,5.3.p.U2
w.(Xqs+Xqr)
où pest le nombre de paires de pôles, Us la
tension statorique, wla vitesse de rotation, et
Xqs l’inductance de fuite du stator et Xqr
l’inductance de fuite du rotor.
De l’équation, on déduit que le couple maxi-
mum est proportionnel au carré de Us, ce qui
implique que les creux de tension ont une
incidence importante sur le couple maximum
du moteur.
Le niveau de charge en régime établi dans la
zone de glissement constant (zone de défluxa-
ge, où la courbe de couple maximum rejoint
la courbe de capacité de charge en régime éta-
bli) et la capacité de surcharge doivent pouvoir
être maintenus, quelle que soit la nature des
perturbations réseau. Une chute de tension
réseau de 10% donne un creux de 19% à
couple maxi (0,9
2
= 0,81).
Ceci s’applique si l’alimentation en courant
continu est fournie par un redresseur à diodes
en montage hexaphasé ou par un redresseur à
thyristors. Si ce dernier abaisse la tension, par
exemple de 830 V à 690 V, vous devez alors
calculer la valeur du creux de tension et défi-
nir s’il affecte la tension moteur. Si on reprend
notre exemple, 830 V - 10% = 747 V, ce qui
est supérieur à 690 V et ne présente, donc,
aucun problème.
En utilisant un redresseur contrôlé à IGBT, vous
pouvez augmenter la tension en fonction du
courant, de façon à masquer les petits creux de
tension aux bornes du moteur. Dans ce cas,
vous optimisez le dimensionnement de votre
moteur car son couple de décrochage n’est pas
atteint.
Si vous respectez tous ces principes de base,
votre système d’entraînement sera dimension-
né en adéquation totale avec les besoins de votre
application, c’est-à-dire que les coûts d’inves-
tissement et d’exploitation seront parfaitement
justifiés, sans aucune dépense inutile.
Philippe Brem
Responsable produits vitesse variable
ABB Industrie
ABB Industrie Drives
15, rue Sully
69150 Décines
Tél. 04 72 05 40 37 - Fax. 04 72 05 40 30
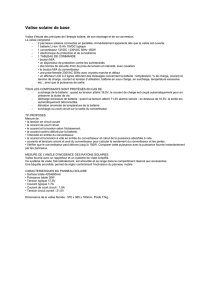
CHOIX DE LA PLAGE DE VITESSE EN SURCHARGE
CI
Capacité
de charge
maximale
Intensité
de surcharge
Surcharge Inutile
Capacité de charge permanente
L'intensité augmente
au-delà du point
de défluxage
Charge en
régime établi
n (tr/min)
S
La plage de vitesse en pointillé
n’étant pas requise, elle entraînerait
le surdimensionnement du moteur
et du variateur de vitesse.
1
/
4
100%