Caractérisation et modélisation de microtransducteurs de pression à

137
CHAPITRE VI
CONCEPTION ET REALISATION
DE DEMONSTRATEURS

Chapitre VI : Conception et réalisation de démonstrateurs 139
CHAPITRE VI
Conception et réalisation de démonstrateurs
VI.1 Introduction
Au cours des chapitres précédents nous avons développé un modèle de calcul par
éléments finis du comportement thermomécanique des membranes composites SiO2/Si. Dans
ce chapitre nous nous servons de ce modèle pour concevoir et réaliser deux architectures de
capteurs à membrane de type PSOI qui sont présentées et discutées. Un logiciel de conception
a été développé au laboratoire au cours de cette thèse pour prévoir la sortie électrique du
capteur en fonction de la réponse en pression et en température du corps d’épreuve, des
propriétés physiques du polysilicium et de la disposition des jauges. La conception des
capteurs a donc demandé un important travail de programmation qui ne sera pas présenté ici.
Nous montrons simplement la technique d’interpolation linéaire des déformations simulées en
surface du corps d’épreuve qui permet de s’affranchir du maillage éléments finis. Nous
donnons également le principe du calcul des variations de résistance des jauges
piézorésistives. Enfin les premiers résultats sur démonstrateurs sont présentés.
VI.2 Position des jauges piézorésistives sur le corps d’épreuve
Le principe de fonctionnement d’un capteur piézorésistif à membrane de type PSOI a été
décrit au chapitre I. Pour obtenir un capteur de pression sensible les jauges piézorésistives en
surface du corps d’épreuve doivent être disposées aux endroits où celui-ci se déforme le plus
sous pression. La simulation par éléments finis de la réponse pneumatique d’une membrane
carrée permet de connaître les zones de sa surface où les déformations sont maximales et
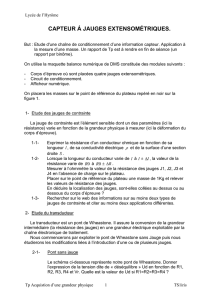
uniaxiales. Comme le montrent les Figure 82.a et Figure 82.b ces zones sont situées sur les
axes médians de la structure près des bords de la membrane. Dans ces zones les déformations
sont positives (tension) et en majorité uniaxiales.
Du fait de la forme carrée de la membrane, la carte des déformations εy est symétrique par

140 Chapitre VI : Conception et réalisation de
démonstrateurs
rapport à la droite d’équation y=x (diagonale) de la carte des déformations εx. Le centre de la
membrane est donc dans un état de déformation biaxiale avec εx • εy. Le centre de la
membrane est en compression.
a)
b)
Figure 82 : carte des déformation εx en surface d’un quart du capteur pour une pression de 100 mbar : a)
représentation plane et b) représentation en 3D. Le corps d’épreuve est une membrane de 3 mm de côté, 20
µm d’épaisseur recouverte par 0,5 µm d’oxyde. Les limites de la membrane apparaissent en trait noir pour
x=y=1,5 mm sur la figure a).
Le principe de positionnement des jauges piézorésistives et la définition d’un pont de
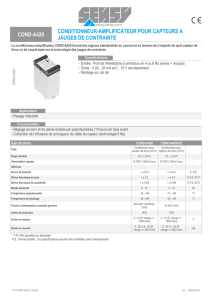
Wheatstone sont donnés dans la littérature [56]. La Figure 83 schématise une membrane
déformée sous l’effet d’une pression appliquée sur sa face supérieure. Une jauge longitudinale

Chapitre VI : Conception et réalisation de démonstrateurs 141
JL est parcourue par un courant I parallèle à la déformation εx. Sa résistance augmente (facteur
de jauge longitudinal positif). Une jauge transversale JT est parcourue par un courant I
perpendiculaire à la déformation εy. Sa résistance diminue (facteur de jauge transversal
négatif). Pour un montage en pont de Wheatstone complet, deux jauges de chaque type sont
nécessaires et doivent avoir la même valeur de résistance au repos pour que la tension de
décalage du pont (offset) soit nulle.
Figure 83 : schéma de principe du positionnement des jauges piézorésistives
Connaissant par simulation les déformations en surface du corps d’épreuve en fonction de la
pression et de la température, la prévision de la sortie électrique du conditionneur piézorésistif
nécessite le calcul des variations de résistance des jauges en fonction de leur disposition par rapport
au champ de déformation et des propriétés physiques du polysilicium.
VI.3 Création d’un logiciel de conception
Nous avons vu au chapitre IV que des limites de la simulation par éléments finis ne permettent
pas la modélisation complète d’un capteur de pression. Le rôle du logiciel de conception appelé
CONCEPT développé au laboratoire est schématisé en Figure 84. CONCEPT fait le lien entre d’une
part le comportement thermomécanique simulé du corps d’épreuve, d’autre part les propriétés
physiques mesurées du polysilicium et enfin la disposition des jauges (layout). Pour une architecture
donnée CONCEPT calcule la sortie électrique du capteur alimenté à courant ou tension constant en
fonction de la pression et de la température.

142 Chapitre VI : Conception et réalisation de
démonstrateurs
Simulation Eléments Finis : ε(P,T)
Propriétés physiques
du polysilicium
Géométrie et emplacement des
jauges piézorésistives
CONCEPT
Exploitation des données
Calcul des ∆R
Sortie électrique du capteur
Figure 84 : schéma fonctionnel de CONCEPT
VI.3.1 Exploitation des déformations en surface du corps d’épreuve prévues
par la simulation par éléments finis
Nous avons montré dans le chapitre V comment se calcule la déformation des jauges à
partir de celles simulées en surface du diélectrique dans l’hypothèse d’une transmission
intégrale des déformations entre le corps d’épreuve et les jauges. Selon le principe même de la
simulation par éléments finis et comme le montre la Figure 85, les valeurs des déformations
en surface de la membrane pour une pression et une température données sont connues pour
un ensemble de coordonnées (xi, yj) où xi et yj sont des valeurs discrètes liées au maillage.
Figure 85 : maillage et valeurs discrètes des
déformations en surface du modèle du corps
d'épreuve
Les positions des jauges piézorésistives ne coïncidant pas forcément avec le maillage,
CONCEPT interpole les valeurs des déformations en tout point du corps d’épreuve. Soit
M(x,y) un point dont on veut connaître la valeur de εx et εy (Figure 86.a), ce point appartient à
une maille repérée par des sommets de coordonnées (xi-1, yj-1), (xi, yj-1), (xi, yj) et (xi-1, yj).
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
1
/
24
100%