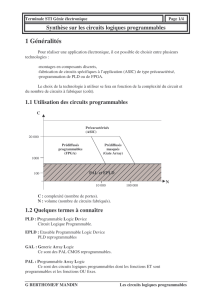
Présentation et classification des circuits

Présentation et
classification des circuits
logiques programmables.
Références : «Le langage VHDL »– Jacques Weber – Editions Dunod
«ASIC et composants logiques programmables »–Denis Rabasté(IUFM)

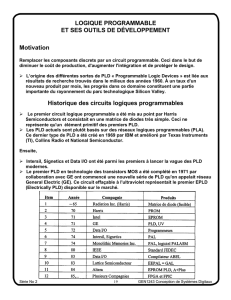
1 - Introduction
• Début des années 80 ÖDébut des circuits logiques
programmables.
• 4 catégories de circuits à cette époque :
–Fonctions standards (T.T.L., M.O.S., usage général).
–Les microprocesseurs (applications industrielles).
–Les séquenceurs programmés (applications
complexes et rapides).
– Les circuits intégrés spécifiques A.S.I.C.
(gros volumes de productions).

1 - Introduction
• 3 grandes phases pour l’évolution de la logique :
– 1975-85 : remplacement des circuits logiques
standards par des circuits programmables.
– 1985-95 : coprocessing (implantation de circuits
logiques complexes autour des microprocesseurs) et
début des circuits logiques à haute densité
d’intégration.
– Depuis 1995 : le circuit logique programmable
devient le niveau supérieur du système. (possibilité
d’implanter un microprocesseur dans un F.P.G.A.).

Nombres de portes Fréquence d’horloge
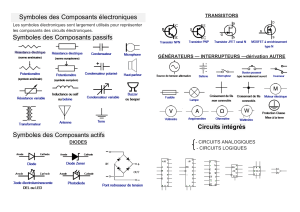
• Progrès des techniques de fabrication :
– Nombre de portes multiplié par 10000 (en 25 ans).
– Fréquence d’horloge multipliée par 50 (en 25 ans).
– Taille d’un transistor : 1,2 µm en 1991 à 0,18 µm en
2000.
–Loi de Moore qui stipule le doublement du nombre de
transistors sur une puce tous les 18 mois.
1 - Introduction

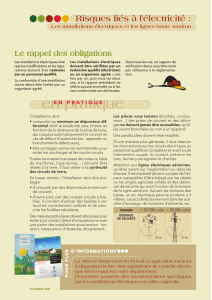
74HC…. Microprocesseurs,
Microcontrôleurs PLD, CPLD,
FPGA ASIC
Circuits
standards
Circuits à
fonctionnement
programmable
Circuits à
architecture
programmable et
faible temps de
développement
Circuits à temps de
développement
important
Circuits
numériques
• Classification et répartition des circuits numériques :
1 - Introduction
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
1
/
85
100%