ÉLECTRONIQUE DE PUISSANCE ( ) ( ) ( )

Spé ψ
ψψ
ψ 2011-2012 page 1/5 Devoir n°5
Spé ψ
ψψ
ψ 2011-2012 Devoir n°5
ÉLECTRONIQUE DE PUISSANCE
P
ARTIE
I
M
OTEUR ELECTRIQUE A COURANT CONTINU ET SA COMMANDE
Le principe de la conversion d’énergie électrique en énergie mécanique repose sur une inte-
raction champ magnétique-courant électrique.
L’espace sera repéré par les bases habituelles
(
)
, ,
x y z
e e e
ou
(
)
, ,
r z
e e e
θ
suivant que l’on
travaille en coordonnées cartésiennes ou cylindriques. L’axe principal de la machine est colinéaire à
z
e
.
Dans la machine à courant continu que nous étudions ici, le stator aussi appelé inducteur est
alimenté par un courant continu, appelé courant d’excitation et noté i
EXC
. Il crée à l’intérieur de la
machine un champ magnétique radial, porté par
r
e
:
r
r
B B e
=
avec
(
)
(
)
EXC EXC
,
r r
B B i K i
= θ = θ
qui est proportionnel au courant d’excitation i
EXC
et qui dépend de θ.
On a
(
)
K k
θ =
pour
,
2 2
π π
θ∈ −
et
(
)
K k
θ = −
pour
, ,
2 2
π π
θ∈ −π − ∪ π
où
k
est une
constante positive.
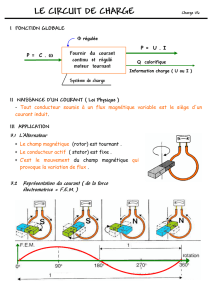
Pour un courant d’excitation
i
EXC
positif donné,
(
)
EXC
,
r
B i
θ
est
alors la fonction de θ constante par morceau représentée figure 1 :
Le rotor, aussi appelé induit, se compose de
N
spires rectangu-
laires montées en parallèles. Les spires de rayon
a
et de longueur
h
, ont
pour axe principal
z
’
z
. Lorsque le rotor est parcouru par un courant
continu
I
, chaque spire est parcourue par le courant
I
S
=
I
/
N
. Ces spires
peuvent tourner autour de l’axe de rotation
z
’
z
.
Un système bagues-balais permet d’inverser le courant dans les
spires à chaque demi-tour de sorte que l’on se trouve toujours dans la
configuration décrite par les figures 2 et 3.
D’un point de vue électrique, chaque spire du rotor a une résistance
r
et une inductance pro-
pre
ℓ
.
D’un point de vue mécanique, le rotor tourne autour de l’axe
z
’
z
à la vitesse angulaire
z
e
Ω = Ω
, on note
J
son moment d’inertie.
(
)
EXC
,
r
B i
θ
θ
π
–
π
π/2
–
π/2
ki
EXC
–ki
EXC
Figure 1
x
y
θ
B
B
conducteur aller
conducteur retour trajectoire d’un conducteur
Figure 2 Figure 3
z
z’
B
B
I
S
I
S
2a
h
α
β
δ
γ
système
bagues-balais

Spé ψ
ψψ
ψ 2011-2012 page 2/5 Devoir n°5
Modélisation :
I-1) Par induction électromagnétique, un circuit électrique peut être le siège d’une tension
induite. Rappeler dans quelle(s) condition(s) ce phénomène appa-
raît ; on distinguera le cas de Neumann et le cas de Lorentz.
I-2) Lorsque le rotor tourne, il apparaît le long des conduc-
teurs aller (
α
,
β
) et retour (
γ
,
δ
) deux tensions induites
e
αβ
et
e
γδ
de
sorte qu’une spire peut être modélisée par le schéma électrique de la
figure 4 .
Déterminer les f.e.m. (forces électromotrices) induites
e
αβ
et
e
γδ
en fonction de
Ω
,
a
,
h
,
k
et
i
EXC
. En déduire la f.e.m. totale in-
duite aux bornes d’une spire.
I-3) On modélise le rotor par le circuit
R
,
L
,
E
alimenté
par une source de tension continue
V
représenté figure 5.
Donner les expressions de
R
,
L
et
E
en fonction de
r
,
ℓ
,
Ω
,
a
,
h
,
k
,
i
EXC
et
N
.
I-4) Applications numériques :
On donne
r
= 12
Ω
;
ℓ
= 1,4 H ;
a
= 25 cm ;
h
= 1,1 m,
N
= 40 spires,
i
EXC
= 0,5 A et
k
= 3,2 S.I. Le moteur fonctionne
en régime permanent à 3000 tours par minute. Il est alimenté par une source de tension
V
= 310 V.
Préciser les valeurs numériques de
R
,
L
et
E
. Quelle est l’intensité du courant absorbé par le
moteur ?
Étude mécanique :
Lorsque le moteur est parcouru par un courant continu
I
, il est soumis à des forces électro-
magnétiques de moment (ou couple)
z
e
Γ = Γ
.
I-5) Exprimer
Γ
en fonction de
I
,
a
,
h
,
k
et
i
EXC
.
Application numérique : calculer le couple
Γ
pour un courant
I
= 113 A.
Étude énergétique
On considère un fonctionnement moteur pour lequel
Ω
= 3000 tr/min,
V
= 310 V et
I
= 113 A.
On note :
P
MECA
la puissance mécanique délivrée par le moteur ;
P
J
les pertes Joule dissipée dans le moteur ;
P
ALIM
la puissance délivrée par l’alimentation.
I-6) Quelle relation existe-t-il entre ces trois puissances ? Calculer chacune d’elles.
I-7) Définir le rendement du moteur et le calculer.
Compromis couple/vitesse :
On suppose ici que le moteur est fortement sollicité de sorte que l’alimentation stabilisée en
tension délivre son courant maximum dit courant de saturation.
V
et
I
sont alors fixés !
I-8) Comment varie la vitesse de rotation du moteur ainsi que le couple
Γ
si l’on diminue
progressivement le courant d’excitation
i
EXC
? Expliquer pourquoi un véhicule tout électrique, moto-
risé par une machine à courant continu, peut s’affranchir d’une boite de vitesse. On pourra, par
exemple, expliquer comment agir sur le courant d’excitation pour simuler un « rétrogradage ».
Alimentation de la machine par un hacheur série
Le véhicule, motorisé par la machine à courant continu (M.C.C.) modélisée précédemment,
est alimenté par une source de tension constante
U
= 400 V, par l’intermédiaire d’un hacheur série,
de rapport cyclique
α
et de période de hachage
T
, représenté figure 6.
r
ℓ
e
αβ
e
γδ
I
S
Figure 4
R
L
E
I
I
Figure 5
V

Spé ψ
ψψ
ψ 2011-2012 page 3/5 Devoir n°5
La M.C.C. est considérée, dans cette partie, comme par-
faite, on néglige sa résistance
R
. Son modèle se ramène ainsi à une
inductance
L
en série avec la f.e.m.
E
. On supposera ici que le
courant d’excitation
i
EXC
ne varie pas. Il est fixé à 0,5 A. La f.e.m.
E
est donc proportionnelle à la vitesse. On a
E
= 276 V pour
Ω
= 3000 tr/min.
La commande du transistor K est la suivante :
sur l’intervalle [0,
αT
], le transistor K est pas-
sant ;
sur l’intervalle [
αT
,
T
], le transistor K est bloqué ;
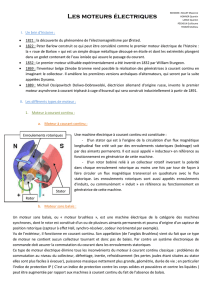
Dans les mêmes conditions de frottement, on a relevé les deux chronogrammes de la figure
7. L’un des deux est obtenu lorsque le véhicule roule sur le plat, l’autre lorsqu’il aborde une mon-
tée.
I-9) Quel chronogramme correspond au fonctionnement en montée du véhicule ? Parmi les
courants
i
K
,
i
D
et
i
, quel est celui relevé sur les chronogrammes ? Quelle est la fréquence de ha-
chage ? Que vaut approximativement le rapport cyclique
α
?
I-10) Écrire l’équation différentielle reliant
i
,
U
et
E
sur l’intervalle de temps [0,
αT
]. En dé-
duire l’ondulation du courant
∆i
=
I
MAX
–
I
MIN
en fonction de
L
,
U
,
E
,
α
et
T
.
I-11) Écrire l’équation différentielle reliant
i
et
E
sur l’intervalle de temps [
αT
,
T
]. En dé-
duire une autre expression de l’ondulation du courant
∆i
=
I
MAX
–
I
MIN
en fonction de
L
,
E
,
α
et
T
.
I-12) D’après les deux relations précédentes, déterminer la relation entre
E
,
α
et
U
. Quelle
est approximativement la vitesse de rotation de la M.C.C. au cours des deux essais correspondant
aux chronogrammes précédents (on prendre
α
= 0,74) ? Quelle est la vitesse de rotation maximale
du dispositif étudié ici ?
I-13) Exprimer
∆i
en fonction de
L
,
α
,
T
et
U
. Retrouver, à l’aide des chronogramme précé-
dent, la valeur de l’inductance
L
si
α
= 0,74.
Partie II
M
ACHINE A RELUCTANCE VARIABLE
Il existe un type de machine électrique, dit
à réluctance variable
(MRV) dont le couple est
dû à l’interaction mutuelle entre une partie fixe (bobines) et une partie ferromagnétique mobile. Elle
est constituée d’un stator en matériau ferromagnétique comportant plusieurs bobines réparties sur
les dents. Le rotor, également en matériau ferromagnétique, guidé en rotation, possède plusieurs
dents. Un schéma d’une machine monophasé est indiqué figure 8.
K
D
i
K
i
D
U
E
L
i
Figure 6
t
Courant (A)
I
MAX
= 61 A
I
MIN
= 50 A
5 ms
0
chronogramme 1
t
Courant (A)
I
MAX
= 126 A
I
MIN
= 115 A
5 ms
0
chronogramme 2
Figure 7

Spé ψ
ψψ
ψ 2011-2012 page 4/5 Devoir n°5
La section moyenne du stator est notée
S
S
et la section de l’entrefer, notée
(
)
E
S
θ
et
dépendante de l’angle
θ
, correspond quant à
elle à la section équivalente en regard entre le
stator et le rotor.
Pour simplifier, on négligera les flux de
fuite ainsi que les effets de bords mais en re-
vanche, on supposera que cette section
d’entrefer varie en fonction de
θ
d’un minimum
S
E,MIN
à un maximum
S
E,MAX
.
Le bobinage comportant
n
spires est
alimenté par une tension
U
et un courant
I
et
possède une résistance globale
R
L
.
II-1) Expliquer succinctement pourquoi
une machine à réluctance variable est plus ro-
buste qu’une machine à courant continu.
II-2) On note
C
MAG
le chemin magnéti-
que moyen associé au circuit magnétique. Ce
chemin est composé d’une longueur moyenne
ℓ
m
de matériau ferromagnétique et d’une longueur totale d’entrefer, dépendant de l’angle
θ
, notée
(
)
[
]
MIN MAX
,e e eθ ∈
. La longueur totale du chemin magnétique fermé est donc
(
)
m
e
+ θ
ℓ
. Le maté-
riau ferromagnétique est de perméabilité relative
µ
r
(on note
µ
0
la perméabilité du vide assimilée à
celle de l’air) et supposé non saturé. On note
H
l’excitation magnétique et
B
le champ magnétique
associé. On supposera que ces deux vecteurs sont de modules constants dans chaque matériau le
long du chemin magnétique (
MAT
H
,
MAT
B
dans le milieu ferromagnétique et
AIR
H
,
AIR
B
dans
l’entrefer).
a) Exprimer
MAG
H d
⋅τ
∫
C
ℓ
de deux manières.
b) Le chemin magnétique s’appuyant sur un tube de champ magnétique, montrer que
le flux magnétique
Φ
traversant une spire de la bobine s’écrit
( ) ( )
0 S
S
m
r E
S
S
nI
Se
µ
Φ =
+ θ
µ θ
ℓ.
II-3) La réluctance magnétique R du montage est définie par la relation
nI
Φ =
R
.
a) Justifier le nom de machine à réluctance variable.
b) Donner la relation entre la réluctance magnétique et l’inductance magnétique
L
définie par
LI n
= Φ
.
c) En fonction de l’angle
θ
variant de 0 à 2
π
, donner le tableau de variation des fonc-
tions
(
)
e
θ
et
(
)
E
S
θ
(l’expression de ces deux fonctions n’est pas demandée). En déduire
l’intervalle
[
]
MIN MAX
,L L
dans lequel varie l’inductance au cours du mouvement du rotor.
II-4-a) Calculer la f.e.m. induite dans la bobine en fonction, en particulier, de
n
et de
( )
(
)
d t
t
dt
θ
Ω =
. Comparer avec le cas d’une machine à courant continu (M.C.C.).
b) Indiquer le schéma électrique équivalent de la bobine et en déduire la relation en-
tre
U
et
I
.
On veut effectuer un bilan de puissance sur l’ensemble du circuit afin de déterminer le cou-
ple électromagnétique appliqué au rotor.
n spires
S
TATOR
R
OTOR
S
S
(
)
E
S
θ
U
I
θ
ℓ
MAG
C
MAG
(
)
/ 2
eθ
Figure 8

Spé ψ
ψψ
ψ 2011-2012 page 5/5 Devoir n°5
II-5) On note
W
MAG
l’énergie du champ magnétique et
P
ELEC
la puissance électrique fournie
au système. Elle se répartit en pertes par effet Joule
P
JOULE
, en puissance mécanique
P
MECA
et en
puissance transmise au champ magnétique
P
MAG
. On note
C
le couple électromagnétique appliqué
sur le rotor. Écrire le bilan de puissance en explicitant chaque terme.
II-6) Compte tenu de l’équation établie en II-2-b, on peut considérer l’énergie magnétique
comme une fonction d’état dépendant uniquement de la position angulaire
θ
et du flux magnétique
Φ
:
(
)
MAG
,
W
Φ θ
.
a) À partir du bilan de puissance de la question précédente et de la loi des mailles,
montrer que le courant et le couple sont donnés, pour tout angle
θ
et tout flux
Φ
, par les relations :
(
)
MAG
,
1
W
I
n
∂ Φ θ
=∂Φ
et
(
)
MAG
,
W
∂ Φ θ
=∂θ
C
.
b) Pour un matériau non saturé, on peut écrire
2
MAG
1
2
W LI
=
. Établir l’expression du
couple électromagnétique instantané
C
appliqué sur le rotor en fonction de
I
et de la dérivée
(
)
dL
d
θ
θ
.
c) Montrer alors que le couple électromagnétique moyen sur un tour du rotor est nul
à courant constant.
Dans le cas où le courant est constant, le couple moyen est nul sur un tour et le moteur ne
peut pas fonctionner. Le principe d’alimentation d’une machine à réluctance variable est donc
d’injecter un courant quand la dérivée
(
)
dL
d
θ
θ
est positive, de façon à avoir un couple instantané
positif, et de ne pas injecter de courant quand cette dérivée est négative, afin d’annuler le couple
instantané. Ainsi le couple moyen est strictement positif. Cette alimentation est possible par
l’utilisation d’un onduleur qui permet d’obtenir un créneau d’intensité I = I
MAX
ou I = 0.
II-7) Déterminer les angles pour lesquels un courant doit être injecté. En déduire la valeur du
couple moyen appliqué au rotor de la machine à réluctance variable monophasée en fonction de
I
MAX
,
L
MIN
et
L
MAX
. Comparer avec le cas d’une machine à courant continu (M.C.C.).
Le couple ainsi obtenu est strictement positif et permet au moteur de fonctionner. De façon à
lisser le couple et à éviter l’annulation du couple pour certains angles, plusieurs pôles sont utilisés
et sont régulièrement répartis sur le rotor (figure 9).
Figure 9
1
/
5
100%