Absorbeurs électroacoustiques pour l`égalisation

Absorbeurs ´
electroacoustiques pour l’´
egalisation modale des salles :
une nouvelle approche avec des haut-parleurs `
a double bobine
E. Rivet, S. Karkar et H. Lissek
LEMA - EPFL, EPFL-STI-LEMA, Station 11, 1015 Lausanne, Suisse
etienne.rivet@epfl.ch

Le d´
efi r´
ecurrent dans les salles d´
edi´
ees aux syst`
emes audio de haute-fid´
elit´
e est l’´
egalisation du champ sonore
aux basses fr´
equences. Selon la position du point d’´
ecoute, la r´
eponse de la salle en ce point peut entrainer des
niveaux de pression acoustique ´
elev´
es qui co¨
ıncident avec les fr´
equences naturelles de la salle. Par cons´
equent, ces
r´
esonances modales conduisent `
a une distribution spatiale irr´
eguli`
ere de l’´
energie acoustique et viennent alt´
erer le
rendu sonore aux basses fr´
equences dans l’espace d’´
ecoute. Alors que la correction acoustique est bien maitris´
ee
aux moyennes et hautes fr´
equences, les traitements habituels ne sont pas efficaces pour dissiper l’´
energie acoustique
aux basses fr´
equences en tout point d’´
ecoute de la salle. Pour faire face `
a ce probl`
eme, la technique de la r´
etroaction
contrˆ
ol´
ee en vitesse, r´
ealis´
ee avec l’aide d’un pont d’imp´
edance ou directement avec des capteurs de mouvement,
permet de modifier l’imp´
edance acoustique de la membrane d’un haut-parleur ´
electrodynamique. Une nouvelle
approche de cette technique est l’utilisation d’un haut-parleur ´
electrodynamique `
a double bobine o`
u la captation de
la vitesse est obtenue `
a partir de la diff´
erence de tensions des deux bobines. Le haut-parleur peut alors ˆ
etre contrˆ
ol´
e
`
a partir d’un courant d´
ependant directement de la vitesse de la membrane, permettant ainsi un contrˆ
ole dynamique
de la membrane. Le but de ce papier est de pr´
esenter cette nouvelle approche facile `
a r´
ealiser, en vue d’une future
application sur l’´
egalisation modale d’une salle.
1 Introduction
Dans l’industrie audio, l’objectif des produits haute-
fid´
elit´
e est la reproduction du contenu musical aussi pr´
ecise
que possible en termes de restitution, c’est-`
a-dire une
r´
eponse en fr´
equence des haut-parleurs aussi plate que
possible. Lorsque ceux-ci sont plac´
es dans une salle, les
r´
esonances de la salle viennent d´
egrader le rendu sonore du
syst`
eme audio aux basses fr´
equences, favorisant certaines
fr´
equences dans la r´
eponse effective au point d’´
ecoute. Les
mat´
eriaux usuels sont inefficaces ou trop imposants pour
avoir un impact significatif aux basses fr´
equences. Les
m´
ethodes de contrˆ
ole actif ou d’´
egalisation multi-points ont
prouv´
e leur efficacit´
e pour des cas simples, mais montrent
leurs limites en termes de complexit´
e pour l’impl´
ementation
ou d’efficacit´
e selon la position du point d’´
ecoute.
Pour rem´
edier `
a ce probl`
eme, il peut s’av´
erer int´
eressant
d’utiliser des moyens ´
electroacoustiques pour absorber le
champ sonore au voisinage de la membrane de haut-parleurs.
Parmi les nombreuses solutions, des strat´
egies ont d´
ej`
a´
et´
e
pr´
esent´
ees avec la r´
etroaction contrˆ
ol´
ee en vitesse en utilisant
un acc´
el´
erom`
etre ou un pont d’imp´
edance [1], des solutions
hybrides avec des r´
etroactions en pression et vitesse, ou
encore la possibilit´
e d’ajouter une charge ´
electrique aux
bornes d’un absorbeur ´
electroacoustique [2, 3]. En utilisant
la r´
eversibilit´
e du rˆ
ole du transducteur comme capteur et
actionneur, un circuit de contrˆ
ole (charge ´
electrique) est
connect´
e`
a ses bornes afin de venir modifier la dynamique
interne du transducteur sans l’utilisation de capteur. L’int´
erˆ
et
des absorbeurs ´
electroacoustiques est de r´
eussir `
a am´
eliorer
l’´
egalisation modale d’une salle aux basses fr´
equences,
lorsqu’ils sont plac´
es dans les coins d’une salle [4].
Une autre innovation est l’utilisation de haut-parleurs
´
electrodynamiques `
a double bobine dans [5, 6]. Le contrˆ
ole
par r´
etroaction se fait grˆ
ace `
a la vitesse induite dans la
tension de la bobine secondaire, obtenue par compensation
de l’effet de l’inductance mutuelle entre les deux bobines.
Cette technique n´
ecessite n´
eanmoins une connaissance
pr´
ecise des param`
etres ´
electriques et m´
ecaniques du
haut-parleur.
Dans ce papier, nous introduisons une nouvelle approche
de l’absorbeur ´
electroacoustique avec l’utilisation d’un haut-
parleur `
a double bobine en montrant qu’il est possible de
contrˆ
oler facilement la membrane par r´
etroaction, sans avoir
besoin de connaitre les diff´
erents ´
el´
ements du transducteur.
Les performances de l’absorbeur sont pr´
esent´
ees par
simulation puis ensuite ´
evalu´
ees exp´
erimentalement. Les
b´
en´
efices de cette m´
ethodologie sont discut´
es et des pistes
de d´
eveloppements futurs sont propos´
ees.
2 Le haut-parleur ´
electrodynamique
`
a double bobine
2.1 Description et caract´
eristiques
Les haut-parleurs `
a double bobine sont des transducteurs
´
electrodynamiques r´
eversibles compos´
es de deux bobines
primaire et secondaire soumises au mˆ
eme champ
magn´
etique. Celles-ci permettent `
a une membrane de
reproduire un signal acoustique en r´
eponse `
a un signal
´
electrique envoy´
e aux bornes ´
electriques. Ces haut-parleurs
offrent une plus grande flexibilit´
e de connexion des entr´
ees
´
electriques `
a l’amplificateur, permettant ainsi d’augmenter la
puissance du haut-parleur ou d’am´
eliorer la qualit´
e sonore.
Une caract´
eristique du transducteur ´
electrodynamique est
qu’il peut fonctionner comme capteur et/ou actionneur,
grˆ
ace `
a la conversion du mouvement m´
ecanique en ´
energie
´
electrique et inversement. Si une tension ou un courant est
envoy´
ee `
a la bobine primaire, celle-ci fournit une force
m´
ecanique `
a la membrane par la r´
eaction d’un champ
magn´
etique (induit par un aimant permanent) sur le courant
circulant `
a travers elle. La tension aux bornes de la bobine
secondaire est alors induite `
a la fois par la vitesse de la bobine
dans le champ ´
electromagn´
etique (force ´
electromotrice) et
de l’inductance mutuelle entre les enroulements primaire
et secondaire. Avec cette caract´
eristique, nous allons voir
comment le haut-parleur `
a double bobine peut fournir une
information sur la vitesse de la membrane, tout en ´
etant
capable d’interagir avec le champ sonore.
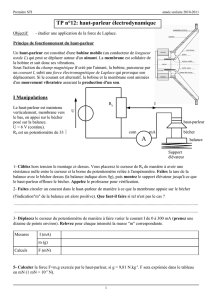
2.2 Mod´
elisation
Consid´
erons un haut-parleur ´
electrodynamique `
a double
bobine plac´
e dans une enceinte close dont la repr´
esentation
sch´
ematique est pr´
esent´
ee sur la figure 1. La partie ´
electrique
du haut-parleur est g´
en´
eralement trait´
ee par la th´
eorie
des circuits lin´
eaires afin d’inclure les effets du couplage
´
electrom´
ecanique. Les ´
equations sont bas´
ees sur les lois
de Kirchhoffet peuvent ˆ
etre ´
ecrites en utilisant notations
complexes (on adopte la convention e+jωtpour l’ensemble
du papier) comme suit :
u1=Ze1i1+Zepi2+Bl v (1)

Figure 1 – Repr´
esentation sch´
ematique d’un haut-parleur `
a
double bobine.
u2=Zesi1+Ze2i2+Bl v (2)
o`
uu1et u2sont les tensions d’entr´
ees appliqu´
ees aux
bornes ´
electriques des bobines primaire et secondaire
respectivement, i1et i2sont les courants parcourant ces
deux bobines, vest la vitesse de la membrane et ωest la
fr´
equence radiale. Les inductances propres sont repr´
esent´
ees
par le mod`
ele de Klippel [7], enrichi d’un second ´
etage
RL-parall`
ele, ce qui permet d’´
ecrire (avec k=1 ou 2) :
Zek =Rek +jωLek +jωL2kR2k
R2k+jωL2k
+jωL2k+1R2k+1
R2k+1+jωL2k+1
(3)
o`
uRe1est donc la r´
esistance DC de la bobine primaire, Le1
est son inductance propre, R2et R3sont les r´
esistances dues
aux courants de Foucault aux moyennes et hautes fr´
equences
respectivement, et L2et L3les para-inductances de la bobine
primaire aux moyennes et hautes fr´
equences respectivement.
Les termes Re2,Le2,R4,R5,L4et L5mod´
elisent de la mˆ
eme
mani`
ere la bobine secondaire.
L’inductance mutuelle est repr´
esent´
ee par le mˆ
eme type
de mod`
ele :
Zep =Zes =jωM+jωLm1Rm1
Rm1+jωLm1
+jωLm2Rm2
Rm2+jωLm2
(4)
o`
uMest l’inductance mutuelle entre les deux bobines, et
Rm1,Lm1,Rm2et Lm2sont les termes mutuels des r´
esistances
et para-inductances d´
efinis par analogie avec le mod`
ele de
Klippel pour les inductances propres.
Si un dispositif `
a haute imp´
edance est utilis´
e pour capter
la tension u2aux bornes de la bobine secondaire (circuit
ouvert), alors le courant i2est nul et les ´
equations (1-2)
deviennent :
u1=Ze1i1+Bl v (5)
u2=Zes i1+Bl v (6)
Pour de petits d´
eplacements et en dessous la premi`
ere
fr´
equence modale de la membrane, la partie m´
ecanique du
haut-parleur peut ˆ
etre repr´
esent´
ee par un syst`
eme masse-
ressort-amortisseur. On d´
efinit ainsi l’imp´
edance m´
ecanique
Zmde l’´
equipage mobile est d´
efini par :
Zm= jωMmc +Rmc +1
jωCmc !(7)
o`
uMmc et Rmc sont la masse et la r´
esistance m´
ecanique du
corps mobile incluant les effets de rayonnement, et Cmc est
la compliance ´
equivalente incluant la compliance m´
ecanique
de la suspension et du spider, et de la compliance acoustique
de l’enceinte close.
L’´
equation r´
egissant la partie m´
ecanique r´
esultant de la
seconde loi de Newton s’´
ecrit :
Sdp=Zmv−Bl i1(8)
o`
upest la pression acoustique agissant sur la membrane,
Sdest la surface de la membrane, et Bl est le facteur de
force. L’imp´
edance de rayonnement (masse et r´
esistance)
est implicitement contenue dans Zmet n’apparaˆ
ıt donc pas
explicitement dans les ´
equations.
Ces ´
equations contiennent les termes du couplage
´
electrom´
ecanique qui d´
ecoulent de l’interaction des
´
el´
ements ´
electriques et m´
ecaniques : Fmag =Bl i1est la
force d’origine ´
electrique r´
esultant du champ magn´
etique
agissant sur une charge libre en mouvement (courant), et
ε=−Bl v est la force ´
electromotrice induite des bobines en
mouvement.
Le mod`
ele se r´
esume finalement au syst`
eme d’´
equations
(5,6,8).
2.3 Identification des param`
etres du mod`
ele
Les param`
etres du mod`
ele d’un haut-parleur ´
electro-
dynamique `
a double bobine (Monacor SPH-300TC) en
enceinte close de 23 litres ont ´
et´
e identifi´
es en suivant la
m´
ethode propos´
ee par [7]. Un bruit blanc large bande est
envoy´
e aux bornes de la bobine primaire avec l’aide d’un
amplificateur en tension (i.e absence de forces externes
Sdp=0). Le courant i1traversant cette bobine et la tension
aux bornes de la bobine secondaire u2sont mesur´
es avec
des capteurs de courant et tension (haute imp´
edance). Les
param`
etres ´
electriques peuvent alors ˆ
etre d´
etermin´
es en
ajustant la mesure de l’imp´
edance ´
electrique d’un mod`
ele
lin´
eaire avec l’utilisation d’un algorithme des moindres
carr´
es. La vitesse vest mesur´
ee en un point de la membrane
`
a l’aide d’un v´
elocim`
etre laser (mod`
ele Polytec OFV-
525/5000-S) et la pression est capt´
ee devant la membrane
10 100 1000 10000
0
10
20
30
40
50
Amplitude ()
Mesure Simulation
10 100 1000 10000
/2
0
/2
Fréquence (Hz)
Phase (rad)
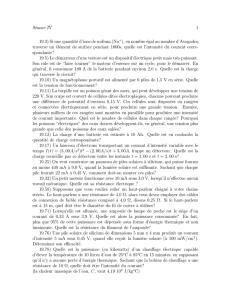
Figure 2 – Diagramme de Bode de l’imp´
edance d’entr´
ee du
haut-parleur en champ libre aux bornes de la bobine
primaire Zin1(mesure et simulation).

10 100 1000 10000
0
10
20
30
40
Amplitude ()
Mesure Simulation
10 100 1000 10000
/2
0
/2
Fréquence (Hz)
Phase (rad)
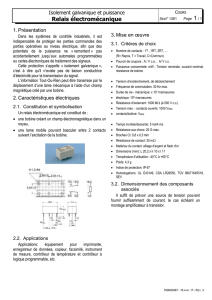
Figure 3 – Diagramme de Bode de la fonction de transfert
entre le courant dans la bobine primaire primaire et la
tension aux bornes de la bobine secondaire en circuit ouvert
u2/i1, lorsque le HP est plac´
e en champ libre (mesure et
simulation).
avec un microphone ICP de type 130D20. Ces deux mesures
servent `
a d´
eterminer les ´
el´
ements m´
ecaniques et le facteur
de force `
a partir des param`
etres ´
electriques pr´
ec´
edemment
estim´
es. Les mesures ont ´
et´
e faites en chambre an´
echo¨
ıque et
trait´
ees avec un analyseur spectral multi-voies Bruel&Kjaer
Pulse.
La figure 2 repr´
esente l’imp´
edance d’entr´
ee du haut-
parleur aux bornes de la bobine primaire :
Zin1=u1/i1=Ze1+(Bl)2/Zm.
La figure 3 repr´
esente la fonction de transfert entre le
courant dans la bobine primaire et la tension dans la bobine
secondaire en circuit ouvert :
u2/i1=Zes +(Bl)2/Zm.
La figure 4 repr´
esente le rapport des tensions de la bobine
secondaire par rapport `
a la bobine primaire :
u2/u1=(ZesZm+(Bl)2)/(Ze1Zm+(Bl)2).
Les param`
etres qui interviennent dans l’imp´
edance
m´
ecanique Zm, l’imp´
edance ´
electrique Ze1de la bobine
primaire (B1) et l’imp´
edance d’induction mutuelle
Zes de la bobine secondaire (B2) sont essentiels pour
l’impl´
ementation du contrˆ
oleur. Les valeurs estim´
ees `
a partir
des mesures sont regroup´
ees dans le tableau 1.
3 Impl´
ementation du contrˆ
oleur
3.1 R´
etroaction de mouvement
`
A partir des ´
equations du mod`
ele dans 2.2, la vitesse v
induite dans la tension u2de la bobine secondaire peut ˆ
etre
10 100 1000 10000
0
0.2
0.4
0.6
0.8
1
Amplitude
Mesure Simulation
10 100 1000 10000
/2
0
/2
Fréquence (Hz)
Phase (rad)
Figure 4 – Diagramme de Bode du rapport des tensions aux
bornes des deux bobines u2/u1, lorsque le haut-parleur est
plac´
e en champ libre (mesure et simulation).
exprim´
ee comme :
v=Bl
Zes Zm+(Bl)2u2(9)
Dans [5, 6], un filtre est impl´
ement´
e pour compenser
l’effet de l’inductance mutuelle entre les deux bobines, et
ainsi extraire l’information de la vitesse vdue `
a la force
´
electromotrice. Cette technique demande n´
eanmoins une
identification tr`
es pr´
ecise de l’imp´
edance ´
electrique mutuelle
bloqu´
ee Zes afin de concevoir un syst`
eme de r´
etroaction de
vitesse performant.
Dans [8], il est montr´
e que la vitesse vpeut ˆ
etre connue
`
a partir d’une combinaison lin´
eaire des deux bobines.
Comme les bobines sont plong´
ees dans le mˆ
eme champ
magn´
etique, les inventeurs supposent que la mutuelle est
´
egale `
a l’inductance des deux bobines. En ajoutant une
inductance Len s´
erie avec la bobine primaire et en faisant
la diff´
erence des deux tensions avec un gain αsur u2(sans
prendre en compte les para-inductances), on a :
u1−αu2=Re1i1+jω(Le1+L−αM)i1+(1 −α)Bl v (10)
En choisissant α=(Le1+L)/M, les inductances peuvent se
compenser dans le circuit tout en gardant une information sur
la vitesse v.
Cependant, d’une part les para-inductances ne peuvent
pas forc´
ement ˆ
etre ignor´
ees, et d’autre part les valeurs des
param`
etres identifi´
es du mod`
ele du haut-parleur du tableau
1 font apparaˆ
ıtre une valeur diff´
erente pour l’inductance
mutuelle Met l’inductance propre Le1de la bobine primaire.
On peut donc s’affranchir de l’ajout d’une inductance Len
s´
erie avec la bobine primaire. On obtient alors dans notre
cas :
u1−αu2=(Ze−αZes)i1+(1 −α)Bl v (11)
On d´
efinit αde telle sorte que Ze−αZes soit un r´
eel et il
vient :
u1−αu2=Kei1+(1 −α)Bl v (12)

Tableau 1 – Param`
etres physiques mesur´
es en petits signaux
du haut-parleur Monacor SPH-300TC charg´
e par un volume
arri`
ere de 23 L.
Param`
etre Notation Valeur Unit´
e
R´
esistance dc (B1) Re16.30 Ω
Inductance (B1) Le10.55 mH
R´
esistance due aux courants de
Foucault MF (B1)
R22.37 Ω
Para-inductance MF (B1) L20.79 mH
R´
esistance due aux courants de
Foucault HF (B1)
R39.70 Ω
Para-inductance HF (B1) L30.53 mH
Inductance mutuelle (B2) M0.50 mH
R´
esistance mutuelle due aux
courants de Foucault MF (B2)
Rm12.11 Ω
Para-inductance mutuelle MF
(B2)
Lm10.94 mH
R´
esistance mutuelle due aux
courants de Foucault HF (B2)
Rm29.67 Ω
Para-inductance mutuelle HF
(B2)
Lm20.52 mH
Facteur de force Bl 11.90 N.A−1
Masse mobile Mmc 85.68 g
R´
esistance m´
ecanique Rmc 4.58 N.s.m−1
Compliance m´
ecanique Cmc 53.20 µm.N−1
Surface de la membrane Sd495 cm2
Fr´
equence de r´
esonance fc76 Hz
o`
uKeest un r´
eel.
La figure 5 montre la combinaison lin´
eaire Ze1−αZes,
qui prend donc ici en compte les para-inductances, pour
diff´
erentes valeurs du coefficient α. On peut voir que pour
α=Le1/M=1.10, l’inductance propre et l’inductance
10 100 1000 10000
0
2
4
6
8
Amplitude ()
= 1.05 = 1.1 = 1.2
10 100 1000 10000
/2
0
/2
Fréquence (Hz)
Phase (rad)
Figure 5 – Diagramme de bode de la combinaison lin´
eaire
Ze−αZes pour diff´
erentes valeurs de α(simulations).
mutuelle s’annule et la combinaison Ze−αZes est quasiment
r´
eelle sur l’ensemble de la plage de fr´
equences d’int´
erˆ
et.
En outre, on retrouve Ke'Re1. D’apr`
es la simulation,
on peut ´
egalement remarquer qu’il n’est pas n´
ecessaire de
connaitre les valeurs des inductances et de leurs mutuelles,
puisque la diff´
erence reste r´
eelle et constante aux basses
fr´
equences pour diff´
erentes valeurs de α. Cela simplifie donc
la conception du capteur de vitesse, puisque αpeut ˆ
etre
choisi arbitrairement pour des valeurs restant l´
eg`
erement
sup´
erieures `
a l’unit´
e.
3.2 Strat´
egie de contrˆ
ole
La strat´
egie de contrˆ
ole consiste `
a faire correspondre
la r´
esistance de la membrane `
a une r´
esistance acoustique
d´
esir´
ee Ra(exprim´
ee en N.s.m−3). La membrane est
consid´
er´
ee comme une membrane de r´
eaction contrˆ
ol´
ee
qui peut interagir dynamiquement avec le champ sonore,
afin d’annuler correctement les ondes sonores r´
efl´
echies.
Cela consiste donc `
a modifier la capacit´
e d’absorption de
la membrane autour de sa fr´
equence de r´
esonance fc, sans
l’utilisation de capteur suppl´
ementaire ou d’un algorithme
de commande de r´
etroaction. L’id´
ee est de b´
en´
eficier du rˆ
ole
de capteur et d’actionneur du haut-parleur ´
electrodynamique
en imposant un courant de contrˆ
ole, qui va venir modifier la
r´
esistance de la membrane pour atteindre une valeur cible
Rat.
Un courant i1proportionnel `
au1−αu2, est impos´
e dans
la bobine primaire `
a l’aide d’un amplificateur en courant :
i1=G(u1−αu2). `
A partir des ´
equations (8) et (12) on
peut d´
eterminer la valeur du gain Gpermettant d’imposer
une r´
esistance acoustique cible Rat `
a la membrane du
haut-parleur :
G=Rmc −SdRat
Re1(Rmc −SdRat)+(1 −α)(Bl)2(13)
On notera que la connaissance des valeurs de tous les
param`
etres du haut-parleur n’est pas n´
ecessaire pour le
contrˆ
ole par r´
etroaction de mouvement. Seul le rapport
α=Le1/Mest n´
ecessaire dans un premier temps. Ensuite,
la connaissance de Re1,Sd,Rmc et Bl permet de d´
eterminer
le gain Gcorrespondant `
a une r´
esistance acoustique cible
donn´
ee. On notera ´
egalement que les valeurs de αet de G
peuvent ˆ
etre d´
etermin´
ees exp´
erimentalement, sans recours `
a
l’identification des param`
etres du mod`
ele.
3.3 Absorption acoustique de la membrane
L’absorption acoustique de la membrane du haut-parleur
peut ˆ
etre calcul´
ee en utilisant l’imp´
edance acoustique
sp´
ecifique (exprim´
ee en N.s.m−3). Ce param`
etre `
a valeurs
complexes est d´
efini comme le rapport de la pression
acoustique totale agissant sur la membrane, sur la vitesse de
la membrane. En substituant l’´
equation (13) dans l’´
equation
(8), l’imp´
edance sp´
ecifique devient :
Z=
p
v=1
Sd jωMmc +SdRat +1
jωCmc !(14)
La figure 6 illustre la simulation de l’imp´
edance
acoustique sp´
ecifique Zpour diff´
erentes valeurs de r´
esistance
acoustique cible Rat list´
ees dans le tableau 2, montrant ainsi
que l’on doit pouvoir imposer une imp´
edance acoustique
 6
7
6
7
1
/
7
100%