Système intelligent d`aide à la conduite et détection/prédiction de la

SYSTEME INTELLIGENT D’AIDE A LA CONDUITE DES POIDS LOURDS :
Détection et prédiction de la mise en portefeuille
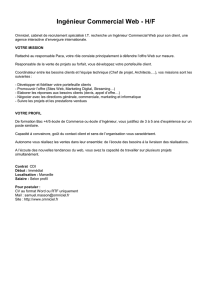
Concept du système
Observateur/estimateur
Objectif :
Élaboration d’alertes pour les poids lourds de types articulés en situations
accidentogènes :
Trouver des méthodes efficaces pour une détection précoces de
situations accidentogènes,
En cas de risque important, générer des alertes aux différents acteurs
(conducteur et gestionnaire de l’infrastructure).
Évaluation du risque
État dynamique
Paramètres du
modèle
Niveau de
risque
Modèle de
PL Cartographie
numérique
Suivi de
trajectoire
Évaluation du critère de renversement
localisation
δ
État
prédit
Évaluation du risque
État dynamique
Paramètres du
modèle
Niveau de
risque
Modèle de
PL Cartographie
numérique
Suivi de
trajectoire
Évaluation du critère de renversement
localisation
δ
État
prédit
Résultats de Simulation
Le système consiste en la prédiction de l’état dynamique du poids lourd
connaissant l’état dynamique à un instant donné, les caractéristiques
géométriques de la route et les paramètres importants du véhicule pour la mise
en portefeuille, l’évolution des caractéristiques géométriques de la route pour
adapter la commande conducteur (la prédiction). L’état dynamique prédit est
ensuite analysé pour caractériser le risque de la mise en portefeuille.
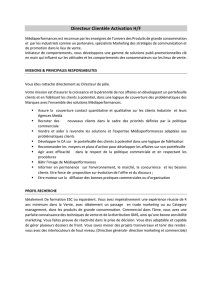
Modèle du véhicule
Comparaison des
trois trajectoire
R1
R0
R2
Xn
Yn
Zn
Modèle dynamique multi-corps rendant compte des mouvements de
pompage, tangage et roulis, alimenté par des mesures (capteurs embarqués)
et des estimateurs (observateurs).
Γ=++ )(),()( qGqqqCqqM
M est la matrice d’inertie et C la matrice de Coriolis, le vecteur G regroupe :
Les effets des forces externes : forces pneumatiques, forces aérodynamiques
Les effets des forces internes : suspensions, frottements
Les actions des couples appliqués : accélération, freinage et braquage des roues
Validation /
Prosper et
Arcsim
Deux cas d’accidents de mise en portefeuille les plus fréquents
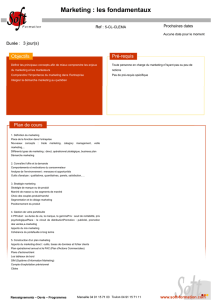
Capteurs logiciels basés
sur la théorie de la
dynamique des
systèmes
Observation de l’état dynamique et estimation des forces de contact
Indicateur de mise en portefeuille
Mise en portefeuille ou dérapage
Équilibre transversale n’est plus garanti. La force centrifuge devient
prépondérante
max
µ
µ
≤
=
z
y
mob F
F
xu
ψ
f
ψ
Fxt
Fyt
Ffx
yu
Fry
Frx
Fyar
Forces estimées
par essieu
Reconstruction de
l’adhérence
mobilisée
0 2 4 6 8 10 12 14
-10
0
10
20
30
40
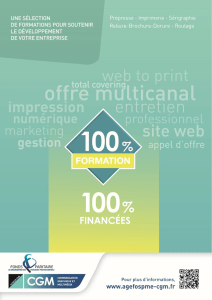
Vitesse angulaire
de lacet relatif en [°/s]
0 2 4 6 8 10 12 14
-20
0
20
40
60
80
Temps en [s]
Lacet relatif en [s]
0 2 4 6 8 10 12 14
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Adhérences mobilisées
Adhérences disponibles
Adhérence disponible
(limite ou seuil)
Début de dérapage
de l’essieu AR du
tracteur
Tendance vers la situation de
mise en portefeuille
Situation de mise en portefeuille
mobilisée
mobilisée
mobilisée
,
,
,
ty
ary
avy
µ
µ
µ
Perspectives
Expérimentation & prévenir les risques en temps réel,
Élaborer des stratégies d’alerte et d’aide à la conduite,
Prévenir les gestionnaires de l’infrastructure sur les zones à risque. Note : Adhérence maximale disponible sur la route est mesurée par l’appareil SCRIM.
- L’adhérence mobilisée dépasse l’adhérence disponible, il y au début de dérapage,
- Cette détection est cohérente avec celles fournis par l’angle de lacet et sa vitesse.
Adhérence mobilisable pour la dynamique transversale est très faible
Mohamed BOUTELDJA1, Véronique CEREZO2, Mathias LIEGEOIS1
1 CETE de Lyon, 25 avenue François Mitterrand, 69674 Bron cedex, France.
2 IFSTTAR, Route de Bouaye CS4 44344 BOUGUENAIS Cedex, FRANCE
1
/
1
100%