Table des matières

Rapport de Travaux Pratiques
Modélisation des systèmes numériques – TP n°1
Gregory Heinrich
Alexandre Harly
Observations du correcteur :

Table des matières
TABLE DES MATIERES .................................................................................................................................... 2
1 OBJECTIFS ................................................................................................................................................. 3
2 PRINCIPE DES ALGORITHMES ............................................................................................................ 3
3 SYSTEME MASSE-RESSORT ................................................................................................................. 4
3.1 REMARQUE PRELIMINAIRE SUR LES TEMPS DE CALCULS ............................................................................ 4
3.2 ALGORITHMES A PAS FIXE ......................................................................................................................... 6
3.2.1 Evolution de la durée de calcul en fonction du pas de simulation .................................................. 6
3.2.2 Evolution du temps de calcul en fonction de l’algorithme choisi .................................................... 6
3.2.3 Précision de simulation en fonction de l’algorithme choisi ............................................................ 7
3.3 ALGORITHMES A PAS VARIABLE .............................................................................................................. 10
4 SIMULATION D’UN SYSTEME HYBRIDE ........................................................................................ 12
4.1 MODELE A BASE DE BLOC DETECTEUR DE ZERO (HIT-CROSSING-BLOCK) ............................................... 12
4.1.1 Algorithmes à pas fixe .................................................................................................................. 13
4.1.2 Algorithmes à pas variable............................................................................................................ 14
4.2 MODELE A BASE DE GRAPHE D’ETAT ....................................................................................................... 16

1 Objectifs
Ce TP a pour objectif de familiariser et sensibiliser les étudiants à l’importance des
paramètres utilisés lorsque l’on désire simuler un système régi par une ou plusieurs équations
différentielles. En effet, dans ces cas, il faut disposer d’un outil permettant de calculer
précisément des intégrales mathématiques. D’autre part, l’utilisation de l’outil informatique
implique la nécessité de recourir à des approximations (ne serait ce que pour passer à un
système à temps continu à un système à temps discret). C’est la finesse de la précision qui
détermine la fidélité du modèle. Il faut donc faire un subtile compromis entre précision (qui
nous donne une meilleure réponse) et durée de simulation.
Dans un premier temps, nous nous intéresserons à un système dont on connaît la solution
analytique. Nous y appliquerons différents algorithmes et en ferons varier les paramètres.
Ensuite, nous observerons le déroulement d’une simulation de système hybride (régi par une
équation non-linéaire).
Ce TP a été réalisé à l’aide de l’outil de calcul scientifique Matlab.
2 Principe des algorithmes
Les algorithmes d’intégration que nous utilisons s’appuient sur cette formule des séries de
Taylor :
Dans la formule ci-dessus, hk est le pas de simulation, la différence de temps séparant deux
calculs successifs de la variable à temps discret x. Le calcul est fait pour un certain nombre de
termes de la série appelé ordre de l’algorithme. Selon le cas, le pas de simulation peut-être :
- une constante : c’est le cas des algorithmes à pas fixe,
- une suite numérique, à valeurs choisies selon la méthode suivante : on choisit une valeur
initiale du pas, on calcule une estimation de l’erreur de précision, et si celle-ci dépasse un
certain seuil, on diminue le pas et recommence le calcul. C’est le type de méthode utilisée
pour les algorithmes à pas variable.
...
)(
!2
)(
)()1( é
é
é
k
kdt kxd
h
dtkdx
hkxkx

3 Système Masse-ressort
Notre système est décrit par le système d’équations suivant :
Nous connaissons la résolution analytique de ce système. Elle est donnée par :
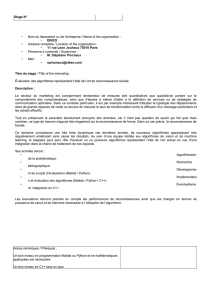
La figure ci-dessous représente le tracé de la solution analytique. On peut rapidement vérifier
la valeur à l’origine (-0.5) et la pente à l’origine (0), ce qui correspond aux deux dernières
équations du modèle.
3.1 Remarque préliminaire sur les temps de calculs
L’un des critères cruciaux qui nous font choisir un algorithme d’intégration est, hormis la
fidélité de la réponse, le temps de calcul nécessaire pour mener à bien la simulation.
Pour déterminer la durée d’une simulation, nous utiliserons sous Matlab une commande du
type :
tic; sim('masseressort');toc
0)0('
5.0)0(
0)()(')(3)('' 3
x
x
txtxtxtx
2
)0(
1
)0(
1
)0(
1
)(
xx
t
x
t
tx é

Le rendu de la commande a la forme suivante :
elapsed_time =
0.1300
La commande toc nous donne le temps séparant son appel et le dernier appel de tic. On a donc
une estimation seulement de la durée de simulation : en effet, le temps affiché est le temps
qu’il a fallu pour :
- interpréter la ligne de commande
- calculer la simulation
- faire tourner les autres processus Windows
Dans la pratique, on a pu voir qu’il y a une durée quasi incompressible entre deux appels tic-
toc d’environ 130 ms. Il faudra donc prendre ceci en compte par la suite.
D’autre part, nous avons vu remarquer que le temps de calcul peut varier sensiblement selon
les exécutions, probablement en raison de la variation d’activité sur le poste de travail.
 6
7
8
9
10
11
12
13
14
15
16
6
7
8
9
10
11
12
13
14
15
16
1
/
16
100%