Moteur à Courant Continue

Moteur à courant continu
1
Moteur à Courant Continu
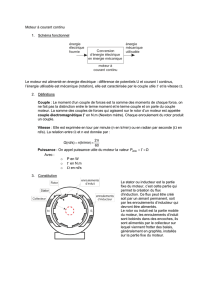
Introduction
Le moteur à courant continu est une solution technologique possible pour réaliser la fonction
‘Convertir une énergie électrique en une énergie mécanique.
Il est très utilisé pour les petites et moyennes puissances car il apporte une très grande souplesse de
fonctionnement avec un encombrement minimum.
Description
Le moteur à courant continu dispose généralement de :
deux bornes d’alimentations,
d’une partie fixe (boîtier) que l’on appelle stator ou
inducteur
d’une partie tournante que l’on appelle rotor ou induit.
STATOR
ROTOR
Le rotor porte les conducteurs actifs reliés aux lames du collecteur sur lesquelles frottent les balais
solidaires du stator. L’enroulement porté par le rotor est l’induit.
Les balais assurent la liaison électrique ( contact glissant ) entre la partie fixe et la partie tournante.
Pour des raisons d’économie, ils doivent avoir une durée de vie aussi longue que possible et assurer
un bon contact électrique. Différentes technologies existent : les balais au charbon dur, les
graphitiques, les électro-graphitiques, et les métallo-graphitiques. On peut considérer que dans un
contact glissant les pertes sont de nature mécanique à 35% et de nature électrique à 65%.
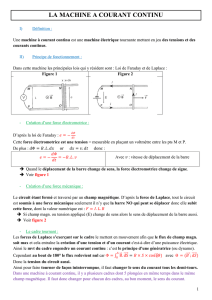
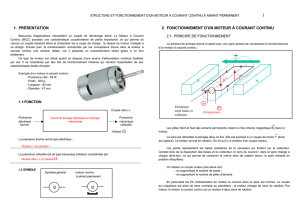
Principe de fonctionnement
Le schéma de principe donné ci-contre pour une
spire sur le rotor permet de comprendre le
fonctionnement d’un moteur à courant continu.
L’inducteur à aimants permanents ou à
enroulement créent un flux dans le moteur.
La spire du rotor est alimentée et plongée dans
ce flux. Elle est alors soumise à une force F de
Laplace. Le moteur se met donc en rotation.
Vu la disposition des balais et des lames du
collecteur, le sens du courant I dans la spire
change à chaque demi-tour, ce qui permet
d’éviter la position d’équilibre.
Pour inverser le sens de rotation du moteur il
suffit d’inverser la polarité de son alimentation.
Le moteur à courant continu est dit réversible
étant donnée qu’il peut transformer une
énergie électrique en énergie mécanique et
inversement.

Moteur à courant continu
2
Schéma Equivalent
L’induit d’un moteur à courant
continu peut être modélisé par le
schéma ci-contre, ce schéma est
composé :
d’une inductance L, formé par
les spires de l’induit (bobine)
de la résistance de ces spires
d’une force électro-motrice E,
qui est la somme des f-e-m de
toutes les spires, lorsque l’induit
est en rotation
U : tension d’alimentation du
moteur, en volt.
I : intensité de courant absorbée
par le moteur, en Ampère.
T : couple moteur en N.m
: vitesse de rotation en rd/s
UL
UR
E
U
L
R
I
T et
D’après ce schéma on peut poser l’équation mathématique suivante :
U = E + R.I + UL
En régime permanent, le courant I est constant donc UL est nul et le schéma équivalent devient donc :
UR
E
U
R
I
T et
E est proportionnelle a la vitesse du moteur et I est proportionnel au couple moteur.
E = K . N T = K . I
k est la constante électromécanique du moteur. Elle s’exprime en V.s/rad
N : vitesse du moteur en rad/s
T : couple en N.m
I : ampère
E : volt
U = E + R.I

Moteur à courant continu
3
Bilan Energétique
Le moteur n’étant pas parfait la puissance électrique absorbée par celui ci n’est pas entièrement
transformé en puissance mécanique, il y a des pertes.
Ces pertes sont dues :
à la résistance de l’induit (et de l’inducteur pour les moteurs à inducteur bobiné), ces
résistances transforment l’énergie électrique en chaleur cette énergie est donc perdue.
aux frottements mécaniques qui freine le moteur.
aux caractéristiques magnétiques de l’induit et de l’inducteur (pertes magnétiques appelées
pertes fer)
Conversion
Electrique/
Magnétique
Conversion
Magnétique
/Mécanique
PA
PEU
PJ
PM
PF
PMU
PA : Puissance absorbée
PJ : Puissance perdue dans l’induit
PEU : Puissance Electrique Utile
PM : Perte mécanique
PF : Perte fer
PMU : Puissance mécanique utile
PA = PJ + PM + PF + PMU
Le bilan des puissances fait apparaître le rendement d’un moteur à courant continu :
= PMU / PA

Moteur à courant continu
4
Caractéristiques Electrique et Mécanique
Dans un problème de motorisation, la charge entraînée impose au moteur de développer un couple
électromagnétique et une vitesse adaptés aux nécessités de fonctionnement.
Il est donc nécessaire pour un moteur donné, de définir l’ensemble des points de fonctionnement
atteignables.
L’équation liée à la mécanique fait intervenir l’inertie ‘J’, la vitesse de rotation ‘(t)’, le couple moteur
‘T(t)’ et le couple résistant TR(t):
)t(T)t(T
dt
)t(d
.J R
Or, en régime permanent, la vitesse est constante, donc :
0
dt
)t(d
d’où T(t)=TR(t)
Lorsque la vitesse est constante, le couple moteur et le couple résistant sont les mêmes (point de
fonctionnement).
I
I0
IN
0
N
0 est la vitesse de rotation à vide
(couple résistant nul, le moteur
n’entraîne aucune charge).
N est la vitesse de rotation en
charge nominale.
A ces deux vitesses correspondent
un courant à vide et un courant à
charge nominale.
T
P
TD
TP
P
TD est le couple de démarrage.
Le point P est le point de
fonctionnement, quand le couple
moteur est égal au couple résistant.
1
/
4
100%