Le moteur asynchrone triphasé

Le moteur asynchrone triphasé
Programme TGC-TGE
B.3.3.4. Moteur asynchrone. Principe de fonctionnement ; vitesse de synchronisme ;
glissement ; bilan simplifié des puissances. Caractéristique mécanique.
Connaissances antérieures utiles
− En sciences physiques : • lois de l’électromagnétisme étudiées en classe de première « génie
civil ».
− En mathématiques : • calculs littéraux élémentaires portant sur l’exploitation d’une formule
donnée.
Connaissances scientifiques
− Citer le principe de production d’un champ tournant.
− Savoir la relation : f = pn. − Citer le principe de fonctionnement d’un moteur asynchrone
(MAS).
− Définir le glissement au moyen d’une formule.
− Représenter l’allure de la caractéristique mécanique du MAS.
Savoir-faire expérimentaux
− Dessiner le schéma du montage de mesure, etc. (voir ci-dessus B.1.).
− Câbler un circuit électrique, etc. (voir ci-dessus B.1.).
− Donner le résultat d’une mesure avec un nombre raisonnable de chiffres significatifs.
− Réaliser le câblage d’un MAS triphasé, le schéma du montage étant donné.
− Mesurer un glissement. − Mesurer une tension, l’intensité du courant, une puissance.
− Exploiter les résultats de mesures (de puissance, de tension et de courant) : cas de la
détermination de la puissance consommée par un MAS et de son facteur de puissance, à vide
et en charge.
Savoir-faire théoriques
− Calculer la vitesse de synchronisme.
− Déterminer le point de fonctionnement d’un MAS entraînant une charge dont on connaît la
caractéristique mécanique.
− Effectuer un bilan des puissances d’un MAS (toutes les pertes étant données).

Programme TGM
B.3.2.4. Moteur asynchrone. Principe du fonctionnement; vitesse de synchronisme;
glissement; bilan des puissances. Caractéristique mécanique. Réglage de la vitesse
par association avec un onduleur autonome.
Connaissances antérieures utiles
- En sciences physiques:
lois de l'électromagnétisme du programme de la classe de Première « Génie mécanique ».
- En mathématiques:
calculs littéraux élémentaires portant sur L'exploitation d'une formule donnée.
Connaissances scientifiques
- Citer le principe de fonctionnement d'un moteur asynchrone (MAS).
- Définir le glissement au moyen d'une formule.
- Représenter l'allure de la caractéristique mécanique du MAS.
- Citer l'onduleur autonome comme moyen de réglage de la vitesse d'un MAS et préciser
l'intérêt de ce type de commande.
Savoir-faire expérimentaux
- Dessiner le schéma du montage de mesure... etc. (voir ci-dessus B.l .).
- Câbler un circuit électrique... etc. (voir ci-dessus B.1 .).
- Donner le résultat d'une mesure avec un nombre raisonnable de chiffres significatifs.
- Réaliser le câblage d'un MAS triphasé, le schéma du montage étant donné.
- Mesurer un glissement.
- Mesurer une tension, l'intensité d'un courant, une puissance.
- Exploiter des résultats de mesures (de puissance, de tension et de courant): cas de la
détermination de la puissance consommée par un MAS et de son facteur de puissance, à vide
et en charge.
Savoir-faire théoriques
- Calculer une vitesse de synchronisme.
- Déterminer le point d e fonctionnement d'un MAS entraînant une charge dont on connaît la
caractéristique mécanique.
- Effectuer le bilan des puissances d'un MAS (toutes les pertes étant données).
Commentaires
Le moteur asynchrone est présenté comme le plus répandu, le plus robuste et le moins
onéreux des moteurs électriques (la visite de la salle des machines d'un lycée montre que la
plupart des machines-outils sont équipées de moteurs asynchrones triphasés de 1,5 kW).
D'une manière générale, l'étude porte sur le moteur asynchrone triphasé (même si la
commande de vitesse d'un moteur asynchrone par un onduleur est illustrée par de petites
machines monophasées). On dégage les qualités essentielles du moteur asynchrone triphasé
(glissement limité, couple qui augmente fortement avec g) en faisant référence aux lois de
l'électromagnétisme étudiées en Première.
Le moteur asynchrone triphasé est une machine peu coûteuse et très répandue. On la trouve
dans :
les machines outils
l'électroménager
les motrices du TGV trans-manche

I. Composition d'un moteur asynchrone
I.1. stator ou inducteur
le stator est composé de conducteurs imbriqués dans des encoches situées autour de la
carcasse. Ces conducteurs forment trois enroulements destinées à être alimentés par un réseau
triphasé. L'ensemble crée un champ magnétique, tournant à la vitesse de synchronisme nS
donnée par la relation: nS=f/p.
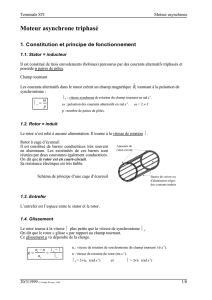
I.2. rotor ou induit
Il en existe de deux types
a. Rotor à cage d'écureuil ( moteur de faible puissance <1kW)
b. Rotor bobiné: il est constitué de conducteurs logés dans des encoches. Ces
derniers forment trois enroulement couplés en étoile de structure semblable à

celle du stator.
Trois bornes situées à l'extérieures et reliées à ces enroulements par
l'intermédiaire d'un système bagues - balais permettent à l'utilisateur de modifier
les propriétés électromécaniques de la machine
I.3. symboles
M
3~
M
3~
II. Principe simplifié
II.1. Expérience
II.2. Interprétation
Les trois bobines produisent un champ B tournant à la vitesse de synchronisme nS. Ce champ
tournant crée des courants induits sur la périphérie du cylindre qui interagissent avec le champ
B en donnant naissance à des forces de Laplace.
Le rotor tourne alors à une vitesse inférieure à la vitesse de synchronisme
La rotation est asynchrone
III. Etude du moteur asynchrone
III.1. Plaque signalétique
Soit la plaque signalétique d'une MAS
220V/380V 50Hz
2,1A/3,6A 750W cos=0,75
1400 tr/min =0,75
220V/380V
la tension aux bornes d'un enroulement doit être 220V
2,1A/3,6A
Intensité nominale du courant en ligne pour un couplage étoile puis
triangle
1400 tr/min
vitesse de rotation nominale
50Hz
fréquence d'alimentation
750W
puissance utile nominale
III.2. Vitesse de synchronisme nS
Elle ne peut être mesurée au tachymètre. Elle est fixée par la fréquence du réseau et p
p
f
nS
ou
p
n2 SS
III.3. Définition du glissement

Le rotor tourne à la vitesse n<nS
S
S
S
S
nnn
g
III.4. Caractéristique mécanique TU=f(n)
V=220V
f=50Hz
On applique un charge mécanique sur le rotor du moteur et on relève TU et la vitesse n
La caractéristique mécanique montre:
un couple important au démarrage
un moment de couple maximum
une zone de fonctionnement linéaire autour du point nominal: le couple utile est alors
proportionnel au glissement: T#g
Conclusion:
En chargeant l'arbre de la machine, la vitesse du rotor à tendance à diminuer (ou g augmente),
cependant cette dernière reste proche de la vitesse de synchronisme ( g proche de 0%)
Tu Nm 0 2,5 5 7,5 9,5 11 9,83 9 7,5 5,5 4,5 4
n tr/min 1498 1450 1400 1335 1245 1150 1000 800 700 500 250 0
g % 0,13 3,33 6,67 11,00 17,00 23,33 33,33 46,67 53,33 66,67 83,33 100,00
Caractéristique mécanique Tu=f(n)
0
2
4
6
8
10
12
0500 1000 1500
Vitesse de rotation n
Couple utile Tu
Série1
 6
7
6
7
1
/
7
100%