c = K e - E

1
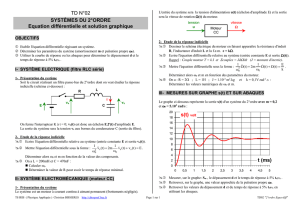
1-Introduction:
Exemple 1 : Régulation de niveau d’eau
Chaque agglomération est dotée d’un château d’eau, assurant son alimentation en eau potable.
Le château est alimenté par une arrivée d’eau dont le débit est réglé par une vanne V
e
.
Les robinets des différents abonnés sont représentés par une vanne V
s
:
le débit de peut on dit que sur est une
Arrivée d’eau
Vanne Ve
Hma
Règle graduée
…. Hmin
L’instruction est de maintenir le niveau d'eau dans le château à une hauteur fixée dite
……………………………….
Pour cela il faut :
- mesurer la hauteur H,
- la comparer à H
C
, (calculer l'écart H
C
- H)
- agir sur V
e
(ouvrir si H
H
C
; fermer si H
H
C
)
: sont les trois tâches principales de l'asservissement.
*Pour mesurer, on utilise :
*Pour comparer, on utilise :
*Pour agir, on utilise :
Automatisation du système :
+Vcc
+V R
R
l Hc
Vc
+
IC1-
R
R
+
IC2
-
2R
R
+V
Electrovanne
R' T
VT
Vs
Par action sur
le curseur on
fixe Vcprop
ortionnelle à Hc
comparateur calculant la
différence
=Vc-Vs
IC2 = régulateur amplifiant le signal de différence
Si
>0 l'électrovanne s'ouvre et se ferme lorsque
Vs = Vc
Capteur constitué d'un poten-
tiomètre fixé sur la paroi du
bassin et délivrant une
tension Vs proportionnelle
à la hauteur de l'eau
Exemple 2 : Conduite d'une voiture
- Consigne :
- Actionneur :
-Capteur : …
Si la voiture , le chauffeur pour voiture + conducteur =

2
2-
Déf
i
nitions:
1°) Un système ……… est un ensemble d'organes physiques agissant de façon qu’une grandeur
dite de ……………, se comporte comme une grandeur …………… dite………
2°) Un ………. est organe physique, qui fournit ………….. (ou mesure) de la grandeur
de sortie :
capteur sortie
3°) Un …………… est un dispositif physique, permettant ………… sur la grandeur de sortie.
Actionneur sortie
4°) Un …………….. fournit un signal qui représente ……………. (la différence), entre la
consigne et la sortie. …………. ………
+
-
…………
Le système asservi est constitué par la superposition des organes suscités :
………… +
-
……………
……………….. ………
……………….
3
–
Modé
li
sat
i
on
d’un
système
asservi
:
Modéliser un système asservi, c’est le décrire par un ensemble d’équations mathématiques
qui peuvent être représentées par un schéma fonctionnel. Un schéma
fonctionnel est équivalent à un ensemble d’équations algébriques traduisant le fonctionnement
du système. Le schéma fonctionnel utilise les symboles graphiques suivants
+
-
Synoptique générale:
La chaîne de réaction, permet de ……………………les systèmes et …………… l'influence des
……………………………….. sur la sortie.

3
e
s
s
4
–
S
CHEMA
FONCTIONNE
L
:
E
x
e
m
ple
:
S
ché
m
a
f
onctionnel de l
a
st
a
tion de po
m
p
a
ge en e
au
u pot
a
ble
Le schéma nous permet d’écrire :
la tension de consigne
V
H
C
V
C
l
la tension de sortie :
V
H
S
V
l
l’écart :
V
C
V
S
l’action du régulateur : la tension d’attaque du transistor est V
T
= 3
.
Vc
=
Vc-Vs
Hc + Hs
Vs
V
l
4– 1 – Simplification des schémas fonctionnels :
Blocs en série : s e s
A B
Déplacement d’un capteur d’amont en aval :
e A s
C C
Déplacement d’un capteur d’aval en amont :
e s
C = Ae
e s
C
Déplacement d’un sommateur d’amont en aval :
s =A (e + p)
e + e +p +
p
e A.e + +
s =A(e + p)
p

4
e
e
Déplacement d’un sommateur d’aval en amont :
e A A.e + +
e + s =Ae + p
p
p
Transformation d’un comparateur en sommateur :
= e-p
+
-
p
= e-p
+ +
p
Passage d’un système d’équation à un schéma fonctionnel :
Exemple 1 : Soient les équations suivantes : ,
K
et
e
s
Le schéma fonctionnel correspondant est :
Exemple 2 : système à deux équations à deux inconnus :
x
3
y
5e
2
x
y
e
Le schéma fonctionnel relatif à ce système d’équations :
-
+ +
-
Passage d’un schéma fonctionnel à un système d’équations :
e + x A +
-
y 1
Y s
B
Les équations sont : ……………………………………………………………………..
FORMULE DE BLACK :
Soit le schéma fonctionnel suivant :
e
+ A s
-
= e-s
e +
S
-

5
On peut écrire les équations suivantes : ………………………………………………………
On définit alors la transmittance du système par :
Cette relation est connue sous le nom de formule de BLACK, elle permet de réduire de le schéma fonctionnel ci-
dessus à :
e s
5–
P
ERFORMANCES
D
’
UN
SYSTEME
ASSERVI
:
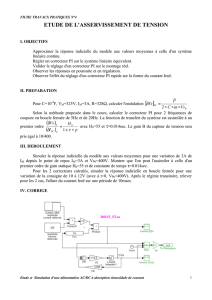
Prenons l’exemple de régulation de température dans une habitation et visualisons la variation de la grandeur de
sortie, c’est à dire la température de l’habitation.
Température en °
20°
………….
15°
10°
5°
0 t
30 min 60 min 90min temps en minutes
Explication du diagramme :
Nous constatons qu’entre la mise en route du système et le moment ou nous obtenons la température désirée il a
fallut un certain temps ,c’est le temps de réponse du système. Pour le système : c’est le régime transitoire
Dès que la température souhaitée est obtenue nous rentrons dans le régime normal du système :
c’est le régime permanent
Nous constatons également que le temps de réaction du système est loin d’être nul, ceci est du à l’inertie thermique
de l’habitation. Nous voyons une oscillation autour de la valeur souhaitée, avec un temps de mise en température.
5–1 Performances
Les performances des systèmes asservis sont caractérisées par les 3 qualités suivantes :
LA PRECISION, LA RAPIDITE, LA STABILITE.
Il sera difficile, voir impossible d’avoir un système précis, rapide, et stable car ces qualités sont contradictoires, le
technicien doit trouver le compromis de façon à respecter le cahier des charges.
5–2 La précision
la précision d’un système asservis est définie par deux grandeurs :
- l’écart statique, l’écart dynamique.
Ecart statique s : c’est la différence entre la consigne et la réponse en régime permanent (ou établi).
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
1
/
25
100%