3. Programmer les entrées/sorties en mode simple.

Royaume du Maroc
OFFICE DE LA FORMATION PROFESSIONNELLE ET DE LA PROMOTION DU TRAVAIL
Première Année
Programme de Formation des Techniciens Spécialisés en
Électronique
DIRECTION DE LA RECHERCHE ET INGENIERIE DE LA FORMATION
Septembre 1995
MODULE 11
Introduction aux Microprocesseurs
Résumé de Théorie
Télécharger tous les modules de toutes les filières de l'OFPPT sur le site dédié à la formation professionnelle au Maroc :
www.marocetude.com
Pour cela visiter notre site www.marocetude.com et choisissez la rubrique : MODULES ISTA

INTRODUCTION AUX MICROPROCESSEURS
RÉSUMÉ DE THÉORIE
Programmer les entrées/sorties en mode simple.
TECCART INTERNATIONAL 2000 inc.
3155, boul. Hochelaga,
Montréal, Québec (Canada)
H1W 1G4
RÉDACTION
Serge Leblanc.
DESSINS ET CONCEPTION GRAPHIQUE
Serge Leblanc
RÉVISION TECHNIQUE
Pierre Asselin B.Sc. & Christian Lépine
RÉVISION LINGUISTIQUE
François Gaudreau
COMMISSION DE VALIDATION
Formateurs de l'OFPPT
Les droits de reproduction et de diffusion de ce document sont cédés par Teccart
International 2000 inc. à l’Office de la Formation Professionnelle et de la Promotion
du Travail du Royaume du Maroc, pour sa propre utilisation au Maroc.
Mis à part l’OFPPT, toute reproduction, en tout ou en partie, par quelque procédé
que ce soit, est interdite.
Mp_Rt3.Doc, imprimé à Montréal, le 17 avril 2017

TABLE DES MATIÈRES
3. PROGRAMMER LES ENTREES/SORTIES EN MODE SIMPLE. 3-1
3.1 Description générale du PIA 3-1
3.2 Brochage du PIA 3-1
3.2.1 Signaux réservés aux données des péripheriques: 3-2
3.2.2 Signaux réservés aux données du microprocesseur: 3-2
3.2.3 Signaux de contrôle et de synchronisation avec les périphériques: 3-2
3.2.4 Signaux de controle et de synchronisation avec le MPU: 3-2
3.3 Branchement du PIA sur le système Mod. E6809 3-3
3.4 Les registres du PIA 3-3
3.5 La programmation du PIA 3-4
3.6 Tableau résumé des fonctions du registre CRA du PIA 3-6
3.7 Choisir et installer un interface de puissance 3-7
3.8 Commande d’un élément de puissance 3-9
3.8.1 Schéma bloc du système 3-9
3.8.2 Algorithme de traitement 3-10
3.8.3 Ordinogramme 3-10
3.8.4 Programme assembleur 3-11
3.9 Convertisseur numérique à analogique 3-12
3.9.1 Rappel 3-12
3.9.2 Schéma électrique du convertisseur N/A 3-12
3.9.3 Programme de contrôle du convertisseur N/A 3-13
3.9.4 Programme assembleur: 3-13
3.10 Convertisseur analogique à numérique 3-14
3.10.1 Schéma électrique du convertisseur A/N 3-14
3.10.2 Le circuit de mise à l’échelle du signal d’entrée 3-15
3.10.3 Le convertisseur analogique à numérique ADC0804 3-15
3.10.4 Programme de contrôle du convertisseur A/N 3-15
3.11 Exercices 3-17

Résumé de Théorie Introduction aux Microprocesseurs
Programmer les entrées/sorties page 3-1 OFPPT/TECCART
3. Programmer les entrées/sorties en mode simple.
3.1 Description générale du PIA
Le PIA (abréviation de Peripheral Interface Adaptor) est un circuit électronique
sophistiqué qui contrôle des périphériques reliés en parallèle. Tous les micro-ordinateurs
travaillent avec des circuits d'entrées/sorties pour assurer la liaison avec le monde
extérieur. Le PIA est incorporé dans bon nombre d'applications commandées par divers
types de microprocesseurs. Ce circuit d'entrée/sortie peut recevoir des contacts simples ou
disposés en matrice, contrôler des lecteurs de LED, des relais ou des opto-coupleurs, etc.
Le PIA est incontestablement très populaire comme interface.
Le PIA communique avec les périphériques via 16 lignes d'entrée/sortie. Ces lignes PAO
à PA7 et PBO à PB7 sont configurées en 2 ports PA et PB de 8 bits (8 lignes). Un port
constitue un groupe d'entrées/sorties parallèles. Chaque ligne est programmée séparément
en entrée ou en sortie. Le programmeur peut contrôler chaque ligne de sortie
individuellement et lire l'état de chaque ligne d'entrée; c'est une question de logiciel !
Ainsi, quand le programmeur lit le port PA programmé en entrée, l'état des 8 lignes PAO
à PA7 est acheminé à travers le PIA puis sur les lignes DO à D7 du bus de données
jusque vers le microprocesseur. Quand le programmeur écrit dans le port B, programmé
en sortie, l'information est envoyée par le microprocesseur via le bus de données (lignes
DO à D7) puis à travers le PIA jusque sur les lignes PBO à PB7 du port B.
Les différences entre le port A et le port B se situent au niveau des possibilités d'échange
avec protocole entre le PIA et les péripheriques. Le port A est mieux adapté aux entrées
tandis que le port B convient mieux aux sorties. Chaque port est doté de 2 lignes de
contrôle: l'une en entrée (CA1 ou CB1) et l'autre en entrée ou en sortie (CA2 et CB2).
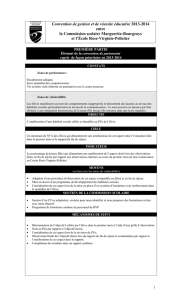
3.2 Brochage du PIA
La figure ci-contre montre le brochage du PIA.
Voici un résumé des signaux et du brochage du
PIA. D’un point de vue fonctionnel, les signaux
appartiennent à 4 catégories.
Signaux réservés aux
données des
périphériques
PA0 à PA7
PB0 à PB7
Signaux réservés aux
données P.
D0 à D7
Signaux de contrôle et
de synchronisation avec
les périphériques.
CA1, CA2
CB1, CB2
Signaux de contrôle et
de synchronisation avec
le microprocesseur.
E, R/W, /RESET CS0,
CS1, /CS2 ,RS0, RS1
/IRQA, /IRQB
Figure 3-1
VSS
PA0
PA1
PA2
PA3
PA4
PA5
PA6
PA7
PB0
PB1
PB2
PB3
PB4
PB5
PB6
PB7
CB1
CB2
VCC
CA1
CA2
/IRQA
/IRQB
RS0
RS1
/RESET
D0
D1
D2
D3
D4
D5
D6
D7
E
CS1
/CS2
CS0
R//W
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
40
39
38
37
36
35
34
33
32
31
30
29
28
27
26
25
24
23
22
21
M
C
6
8
2
1

Résumé de Théorie Introduction aux Microprocesseurs
Programmer les entrées/sorties page 3-2 OFPPT/TECCART
3.2.1 Signaux réservés aux données des péripheriques:
PA0- PA7 Port A lignes d'entrée ou de sortie (logique à 3 états).
PB0 PB7 Port B lignes d'entrée ou de sortie (logique a 3 etats).
Ces lignes ne supportent pas de transferts bidirectionnels de données. Chaque ligne peut
fournir en source 1mA à 1.5 V et conduire la base d'un transistor. En entrée, chaque ligne
est à l'état 0, si la tension appliquée est de 0.8 V et moins et à l'etat 1, si la tension
appliquée est de 2 V et plus. Une ligne du port B (assigné en sortie) entre en état de haute
impédance lors d'une lecture.
3.2.2 Signaux réservés aux données du microprocesseur:
DO - D7 Lignes du bus de données assurant le transtert bidirectionnel d'information
entre le microprocesseur et le PIA. Ces lignes fonctionnent en logique à 3
états.
3.2.3 Signaux de contrôle et de synchronisation avec les périphériques:
CA1 Ligne, en entrée seulement, utilisée pour signaler une cause d'interruption
d'un périphérique.
CA2 Lorsque CA2 est programmée en entrée. cette ligne fonctionne comme
CA1. Lorsque CA2 est programmée en sortie, elle est utilisée comme
signal de réponse sur les données reçues au port A.
CB1 Ligne, en entrée seulement, utilisée pour signaler une cause d’interruption
d'un périphérique.
CB2 Lorsque CB2 est programmée en entrée, cette ligne fonctionne cornme
CB1. En sortie, elle véhicule un signal associé à l’envoi de données sur le
port B.
3.2.4 Signaux de controle et de synchronisation avec le MPU:
E Signal de synchronisation d’horloge avec le MPU.
R/W Si R/W = 1, le MPU lit dans le PIA les données provenant des
périphériques où il lit les registres DDRA, DDRB, CRA ou CRB.
Si R/W = O, le MPU écrit des données dans le PIA pour les envoyer aux
périphériques où il programme les registres DDRA, DDRB, CRA et CRB.
/IRQA et Lorsque ces deux signaux passent à l'état logique 0, ils signalent une
/IRQB demande d'interruption provenant du PIA. Les broches /IRQA et
/IRQB sont généralement connectées aux lignes d’interruptions du CPU.
/RESET Signal qui remet à 0 les registres internes du PIA. Lors d'un reset, les ports
A et B sont en entrée.
CS0, CS1 et /CS2 : Le boîtier du PIA sera choisi si CSO = 1, CS1 = 1 et CS2 = O.
RSO et RS1 Ces 2 lignes donnent accès aux 6 registres internes du PIA; 4 registres sont
accessibles directement et les 2 autres le sont de façon indirecte.
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
1
/
21
100%