Architecture des ordis

Système d’exploitation et architecture des ordinateurs
Architecture des ordinateurs :
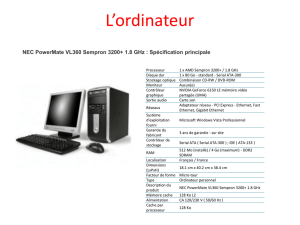
L’ordinateur
Fonction d’un ordinateur
La mémoire cache est une mémoire intermédiaire, on charge les instructions qui sont
l’ensemble du programme ;
La mémoire interne est la mémoire principal ;
La mémoire externe, ex : lecteur dvd, disque dur ;
Les entrés sorties : souris, clavier.
Exécuter des programmes ;
Les programmes se composent d’un ensemble d’instructions ;
Les instructions sont rangées en mémoire ;
Les composants de l’ordinateur :
Processeur
Mémoire (stocker les donnés)
Module entré sortie
Bus système (prend en charge toutes les communications entre les élément ;
CP : compteur de programme, adresse mémoire des instructions, augemente la vitesse
CPU : registre interne, registre tampon
RI : registre interne
RT :
Le processeur lit une à une les instructions dans la mémoire et les exécute ;
Le cycle d’instruction est le traitement nécessaire pour une instruction :
Lecture d’une instruction
Lecture d’une ou plusieurs opérandes
Rangement d’une ou plusieurss opérandes
Test d’interruption (sert à vérifier les instructions).
Le CP (compteur de programme) contient l’adresse de lza prochaine instruction à lire :
Il est incramenté à chaque lecture
Le processeur place l’instruction du CP dans le RI (registre interne) et incrémente le CP ;
Puis il traite l’instruction.
Types d’instructions en mémoire : calculs, mise en mémoire, vérifications
L’intruction peut-être :
Une lecture ou une écriture mémoire
Une lecture ou une écriture E/S
Un traitement arithmétique des données
Un contrôle : la prochaine instruction est à l’adresse…
(Cas des instructions conditionnelles et des appels de sous-programmes)

Une interruption comme (sont nom l’indique) interrompt le cycle d’instructions ou le
programme en cours d’exécution.
Types d’interruptions : temporisations, manque de mémoire, vérification exécution d’autres
programmes, reset,
Une interruption peut être :
Une interruption de programme :
Dépassement de capacité
Division par 0
Instruciton illégale
Un temporisateur :
Permet au système d’exploitation d’effectuer régulièrement certaines fonctions
Une interruption E/S :
Exemple : l’utilisateur écrit au clavier
Une défaillance matérielle
Pour chaque périphérique E/S il y a un gestionnaire d’interruption
Un périphérique E/S
Les différentes structures de bus :
Les lignes de données
Transmettent uniquement des données
Déterminent les performances
Les lignes d’adresses
Désignent la source ou la destination des données du bus de données
Les lignes de contrôle
Contrôlent l’accès et l’utilisation des lignes de données et d’adresse
Physiquement, ce sont des lignes métalliques gravées sur la carte.
Ordinateurs modernes :
Hiérarchisation des bus
Des tampons sont ajoutés entre les bus
Le bus PCI
Bus interne permettant de connecter des cartes d’extension sur la
carte mère d’un ordinateur
Bus haut débit
Indépendant du processeur
Meilleurs performsances que le bus système
La mémoire cache
Influence directe sur la performance d’un ordinateur
Pour améliorer les performances :
Garder au plus près du processeur (en cache), les accès récents
De manière à accéder le moins possible à la mémoire externe
La mémoire cache est une copie de certaines parties de la mémoire principale ;
Lorsque le processeur tente de lire un mot, il vérifie auparavant s’il ne se trouve pas déjà
dans le cache ;
L’accès aux mots est ainsi plus rapide ;

Si le mot ne se trouve pas dans le cache, on copie d’abord le bloc dans le cache ;
Puis le cache donne l’accès au mot au processeur ;
Il est fort probable que lorsqu’on souhaite accéder à une information d’un bloc, on souhaite
accéder aux informations environnantes de ce mot dans le bloc.
Le cache doit être suffisamment grand
Stocker toutes les données nécessaires
Le doit être suffisamment réduit
Pour permetre d’accéder aux informations rapidement
Hiérarchie de caches
PowerPC G4
1 cache interne : cache L1
un cache pour les données de 32Ko
un cache pour les instruction de 32Ko
2 cache externes
cache L2 : cache mixte (données et instruction) de 256Ko à 1Mo
Cache L3 : cache mixte données et instruction de 2…
Pentium 4
1 cache interne cache L1
un cache pour les données de 8Ko…
Il existe différents algorithmes pour remplacer les blocs dans le cache
Du plus efficace au moins efficace :
Moins récemment utilisé : LRU : least recently used
Premier entré premier sorti : FIFO : first in first out
Moins fréquemment utilisé : LFU : least frequently used
Remplacement aléatoire
La mémoire interne
Mémoire principale de l’ordinateur.
DRAM :
Dynamic Random Access Memory
Mémoire vive interne
L’information est une charge électrique sur un condensateur
Cette charge diminue avec le temps et doit être rafraichie régulièrement
Une valeur seuil détermine si c’est un 1 ou 0 pour le bit
L’information s’efface avec le temps
Selon vous, est il utile d’attendre 10 à 20 secondes avant…
La DRAM synchrone (SDRAM) (IBM) :
Echange les données avec le processeur en synchronisaton avec une horloge interne
Quand une requête est faite par le processeur, le nombre de cycles au bout duquel de DRAM
aura fait l’action est connue par avance
Le processeur peut donc continuer à travailler
Envoyer des données vers processeur deux fois par cycle
DRAM rambus (RDRAM) :

Principale concurrente de la SDRAM
Basée sur un bus interne qui définit la vitesse transmission
Le type d’action est transmis par le bus et intégré aux données transmises
Gian de temps
Vitesse de bus : 800 mb/s
DRAM cache (CDRAM) (mitsubichi) :
Elle inclut un petit cache SRAM de 16 ko
Elle peut servir de véritable cache ou de tampon pour prendre en charge l’accès séquentiel à
un bloc de données
Préchargement dans la SRAM cache
SRAM :
Static Random Access Memory
Mémoire vive interne statique
La plus rapide à se décharger
Tout disparaît lorsque l’alimentation est coupée
Utilisée pour le cache
Pourquoi ?
ROM :
Read Only Memory
Mémoire morte
Mémoire permanente (non volatile, lecture seule), les données ne peuvent être effacées
Elle sert aux :
Sous programme des bibliothèques pour les fonctions fréquemment utilisées
Programmes du système
…
PROM :
Programmable ROM
ROM programmable une seule fois
EPROM :
Erasable PROM
ROM effaçable et programmable globalement et électriquement par (rayonnement uv)
EEPROM :
Electrical EPROM
EPROM programmable octet par octet
Mémoire flash :
PROM effacble par bloc
La mémoire externe
Disque magnétique
Aspect physique :
C’est un plateau rond composé
D’un matériau non magnétique (surbstrat)
Recouvers d’un plateau…
Les données sont enregistrées puis récupérées du disque via une bobine conductrice : la tête

La tête est fixe et le plateau tourne en dessous en phase de lecture et d’écriture
Sur la plupart des disques il y a une tête de lecture et une tête d’écriture
Sur le plateau les données sont oragnisées en anneaux concentriques : pistes
Largeur d’une piste = largeur de tete
Une surface contient des milliers de pistes
Des espaces entre les pistes évitent les erreurs induites par un mauvais alignement de la
tete sur les pistes
Les pistes sont divisées en secteurs
Quelques centaines de secteurs par piste
La lontgueur d’un secteur est fixe 512 octets
Les secteurs adjacents sont séparés par des espaces intersecteur
Des marqueurs invisibles à l’utilisateur délimitent chaque secteur : début, taille, identifiant du
secteur, numéro de piste, fin.
Disque à tête fixe : une tête de lecture / écriture par piste
Disque à tête mobile : une seule de lecture / écriture, une montée sur un bras déployable et
rétractable, un arbre fait tourner le disque.
Les pistes d’une surface de plateau constituent un cylindre.
2 types de disques :
Disques simple face
Disques double face une couche magnétique sur les faces du plateau
Certains disques contiennent plusieurs plateaux une tête par surface de plateau
Pour mesurer la performance des accès à un disque :
Temps d’attente du composant
Lorsqu’un processus émet une requête d’E/S, il doit d’abord attendre dans une file
d’attente qu’un composant soit disponible avant de lui être assigné
Temps d’attente du canal
Si le canal est partagé avec d’autres lecteur de disques, il y a un délai d’attente
supplémentaire
temps de positionnement :
temps nécessaire pour positionner la tête au dessus de la piste
disques durs modernes < 10 ms
le controleur de disque attend ensuite que le secteur approprié tourne pour venir s’aligner
avec la tête
délai du au composant occupé :
si le composant fait une autre tâche, il faut attendre qu’il ait fini le cycle
délai de rotation :
temps qu’il faut pour positionner le début du secteur sous la tête
disques durs modernes : entre 100 ms et 50ms
La technologie RAID
Reductant array of independant disks :
Reseaux redondants de disques indépendants
Utilisation de plusieurs disques externes en parallèle :
Accèus simultanés à plusieurs disques
 6
7
8
9
10
6
7
8
9
10
1
/
10
100%