LE MOTEUR A COURANT CONTINU

LYCEE CONDORCET – Montreuil sous Bois TGE2
Les moteurs à courant continu
Page 1 sur 4
LE MOTEUR A COURANT CONTINU
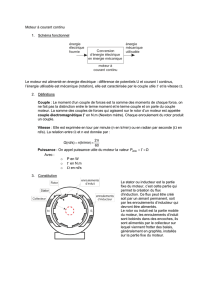
I. Présentation :
Le moteur permet de transformer l’énergie électrique en énergie mécanique.
II. Définitions :
La vitesse de rotation s’exprime soit en tour/minute (noté n en tr/min) soit en radian
par seconde (noté en rd/s) : On a alors la relation : (rd/s) = n(tr/min) *
Error!
Le couple moteur est la somme des couples de forces créées dans les bobines du
moteur et agissant sur la partie tournante du moteur. On parle de couple
électromagnétique : T (en Newton x mètre : Nm). Plus le nombre d’enroulements
(bobines) est important, plus le couple est important.
La puissance utile est donnée par la formule : Putile (en W) = T (en Nm) x (rd/s)
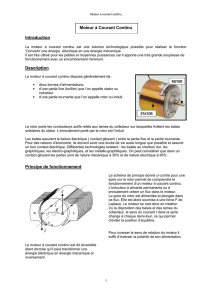
On appelle STATOR la partie fixe du moteur aussi appelé inducteur.
Le ROTOR est la partie tournante du moteur aussi appelé induit.
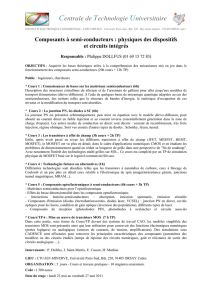
III. Description :
Le schéma de principe donné ci-dessus pour une spire sur le rotor permet de comprendre le
fonctionnement d’un moteur à courant continu.
Les pôles Nord et Sud des aimants permanents du stator créent un flux dans le moteur.
Si on augmente le nombre de spires, on obtient :
La somme des moments des

LYCEE CONDORCET – Montreuil sous Bois TGE2
Les moteurs à courant continu
Page 2 sur 4
couples des forces est appelée couple électromagnétique.
Un moteur à courant continu peut tourner dans les deux sens. Il suffit d’inverser le
sens d’alimentation des spires.
Les aimants permanents du stator peuvent être remplacés par des bobines qu’il faut
alimenter afin de créer le flux moteur.
Un moteur à courant continu est réversible. Il peut fonctionner en génératrice ; en
faisant tourner le rotor du moteur grâce à une force extérieure, on récupère de
l’énergie électrique aux bornes des spires de l’induit (dynamo).
IV. Schémas équivalents et relations :
Principales relations :
Dans chaque spire alimentée, il se crée une force électromotrice (f.e .m en volt). On
définit E (en volt) la somme des toutes les forces électromotrices des spires.
Chaque spire de l’induit est parcourue par un courant. I est la somme des courant
parcourant les spires de l’induit.
Le stator (partie fixe) crée un flux f dans le moteur.
T en Nm est le couple électromagnétique disponible sur l’axe moteur.
Les paramètres sont liés par les relations suivantes :
E = K x x et T = K x x I et T x = E x I
K est une constante qui dépend du nombre de spires de l’induit et du nombre de pôles
de l’inducteur.
Le produit E x I est appelé puissance électromotrice (en W). C’est la puissance qui est
responsable de la rotation du moteur.
K = K x f est appelé constante électromagnétique (constante quand le flux est
constant cad la plupart des cas (aimants permanents ou inducteur alimenté par une
source constante))
On en déduit que : E = Kx et T = K x I
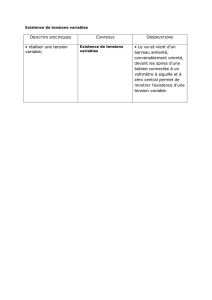
Relations électriques :
L’induit peut se modéliser par :
La résistance R des enroulements ;
Une force électromotrice E qui est la somme des fem de toutes les spires ;
L’inductance L formée par les enroulements (bobine).
D’où le schéma de l’induit :
Et la relation :
R
L
EU
I

LYCEE CONDORCET – Montreuil sous Bois TGE2
Les moteurs à courant continu
Page 3 sur 4
U(t) = e(t) + R.i(t) + L x
Error!
En régime permanent, le courant I ne varie plus. Ldi(t)/dt devient nul. Le schéma
équivalent devient donc :
R
EU
I
Et l’équation électrique : u(t) = R.i(t) + e(t).
V. Alimentations des moteurs à courant continu
La vitesse de rotation d’un moteur dépend approximativement de E, donc de la
tension d’alimentation si on néglige la chute de tension R.I.
U # E # K.
Le couple T du moteur dépend du courant traversant la bobine : T = K.I
Le sens de rotation du moteur dépend du sens de son alimentation.
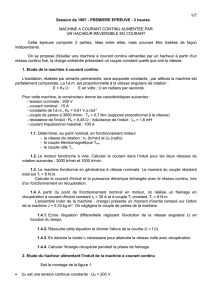
Commande par pont en H
Principe :
Lorsque les interrupteurs T1 et T4 sont fermés,
UM = VCC > 0 ; le moteur tourne dans un sens.
Lorsque les interrupteurs T2 et T3 sont fermés,
UM = VCC < 0 ; le moteur tourne dans l’autre
sens.
Les interrupteurs sont des transistors commandés. Si
nécessaire, on adjoint des diodes de roue libre afin
d’évacuer l’énergie en cas de blocage des transistors
en régime établi. (Effet inductif du moteur)
Réalisation pratique :
S à l’état haut : seuls les
transistors T1 et T4 sont
commandés (saturés) et
UM = VCC – 2Vsat # VCC > 0. Le
moteur tourne dans un sens.
S à l’état bas : seuls les
transistors T2 et T3 sont
commandés (saturés) et
UM = -VCC + 2Vsat # - VCC < 0. Le moteur tourne dans l’autre sens.
NB : Les transistors utilisés sont adaptés de façon à pouvoir véhiculer le courant moteur (transistor de
puissance)
Rôle des diodes de roue libre

LYCEE CONDORCET – Montreuil sous Bois TGE2
Les moteurs à courant continu
Page 4 sur 4
Quand le moteur tourne (un des deux couples de transistor commandé), si tous les
transistors redeviennent bloqués, le courant IM étant établi (IM≠0), il va devoir trouver un
chemin pour continuer à circuler.
Exemple : T1 et T4 commandés :
En régime établi, IM = (UM-E)/R
Si on coupe l’alimentation (ouverture de T1 et T4) l’inertie du moteur et de sa charge
continuent à faire tourner le moteur. Donc IM doit trouver un chemin, qu’il trouve par les
diodes D2 et D3 : UM devient alors < 0 (-VCC) et le courant
décroît jusqu’à 0, moment où les diodes se
bloquent. L’arrêt du moteur se fait sans
dommage.
Commande avec mesure de courant
On vient mesurer la valeur du courant dans le moteur en permanence afin d’éviter sa
destruction en cas de problème (couple résistant trop important), ou afin de procéder à une
régulation de vitesse par boucle de courant. On utilise principalement la méthode de
mesure de courant par une résistance RS de faible valeur (quelques Ohms) placé en série
(Umesure = RS.Imoteur). Quel que soit le couple de transistor
commandé, le courant IS = IM, donc
la tension VS = RS x IM.
RS doit être de faible valeur pour
éviter de créer une chute de tension
(perte) trop importante.
Il faudra aussi dimensionner
correctement la puissance de RS
(pour les forts courants moteur).
1
/
4
100%