II. Cahier des charges

A
A
AV
V
VA
A
AN
N
NT
T
T
P
P
PR
R
RO
O
OJ
J
JE
E
ET
T
T
N
N
N°
°
°1
1
1
Motorisation convoyeur de bobines
Département de Génie Mécanique 2006
Description rapide :
Proposer une ou plusieurs architecture(s) du système de
propulsion
Proposer les solutions techniques envisageables
Proposer un rapide dimensionnement en puissance des
éléments du système
Analyser la possibilité de fournir une énergie hydraulique
commune pour la fonction de propulsion et de levage
Donner un avis sur la solution qui semble convenir au mieux

I. Introduction
Le convoyeur de bobines est utilisé dans la chaîne de production, comme un moyen de
transporter de manière semi-automatique, des bobines d’aluminium depuis l’aire de stockage
jusqu’aux deux dérouleuses. Il doit s’adapter à un équipement génie civil existant et satisfaire
un cahier des charges.
Le but de cet avant projet est de réaliser une pré étude quant à la propulsion de ce
convoyeur.
II. Cahier des charges
On rappelle rapidement l’énoncé du cahier des charges concernant les performances
désirées du système de propulsion :
Cadences : 35 manœuvres/jour
Vitesse de déplacement : Vmax = 0.06 m/s
Fonction : déplacement le long du rail
Un des galets du convoyeur doit être directeur
Sources d’énergie possibles :
o Courant triphasé
o Pneumatique
o Autres sources autonomes
Garde au sol maximum : 400mm
Même source d’énergie pour le convoyage et le levage
Si un moteur est utilisé, il sera embarqué sur le convoyeur
Durée de vie estimée : 50000 heures (24h/24 , 7j/7)
III. Architectures réalisables
A. Architecture 1 : puissance électrique
puissance
mécanique
B.
L’énergie utilisée est le courant triphasé au travers d’un conducteur de puissance se
déroulant afin de suivre le convoyeur. Elle est transformée directement en énergie
mécanique utilisable par l’intermédiaire d’un moteur électrique puis transmise, adaptée et
enfin appliquée à la charge.

Architecture 2 : électrique
hydraulique
mécanique
L’énergie utilisée est le courant triphasé au travers d’un conducteur de puissance se
déroulant afin de suivre le convoyeur. Elle est transformée en puissance hydraulique au
travers d’une pompe hydraulique, distribuée puis transformée sous forme d’énergie
mécanique par l’intermédiaire d’un moteur hydraulique. Enfin, l’énergie est adaptée pour être
transmise à la charge.
C. Architecture 3 : pneumatique
mécanique
L’énergie utilisée est pneumatique acheminée à bord du convoyeur par l’intermédiaire
d’un flexible suivant l’engin. Le reste de l’architecture est classique.
IV. Solutions techniques envisageables
A. Définition des besoins à partir du CDCF
En utilisant ces paramètres :
Vmax = 0,06 m/s Largeur voie = 1740 mm
Masse virole = 326 kg Excentration charge = 450 mm
Masse bobine = 8644 kg Pression pneumatique = 600000 Pa
Masse totale = 8969 kg Durée de vie = 50000 h
Coef frottement rail/roue = 0,1 réduction transmission = 1 Couple frein 44 N.m
Rayon roue motrice = 100 mm couple moteur Cm = 110 N.m
OG 0mm OP -1000 mm
0mm 0mm
2000 mm 0mm
OA1 1000 mm OA2 1000 mm
420 mm -1320 mm
0mm 0mm
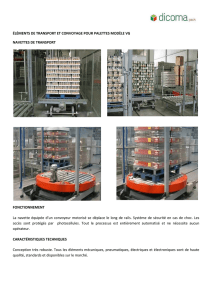
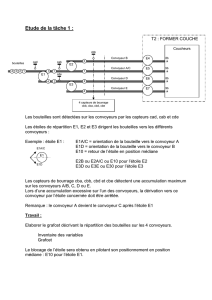
Etude de la partie puissance du convoyeur - déplacement du convoyeur
Données techniques (non modifiables)
Paramètres conception
Paramètres spatiaux des points d'appui et du centre de gravité supposé
A2
G
A1
O
y
z
x
O
z
A1
P

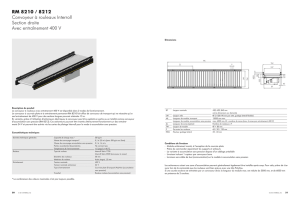
On obtient :
En A1 0 En A2 0 En P 0
0 0 0
21997,26 N21997,26 N43994,51 N
Ta (max) = 1099,86 N
C (max) = 109,99 N.m
w (max) = 5,73 rpm
0,164 m/s²
0,367 s
0,012 m
=-0,065 m/s²
0,917 s
Temps arrêt =
Réactions aux appuis
Statique du robot
Décélération max =
Accélération max =
Temps vitesse désirée =
Distance parcourue =
Etude de la partie puissance du convoyeur - déplacement du convoyeur
Effort tangentiel maxi
Couple maxi transmissible
Dynamique du robot
On constate qu’avec un poids total (bobine + convoyeur) estimé à
1.5 bobine
P
soit
13450 kg, un coefficient de frottement entre la roue et le rail de 0.1 (acier/acier) et un rayon
de roue de 40mm, on arrive à un couple maximal transmissible de 44 Nm environ. Ceci est
une estimation faite pour un coefficient de frottement relativement faible.
En première approximation, on peut dire que le moteur doit fournir 40 Nm pour
déplacer l’ensemble avec la meilleure dynamique possible (tout en gardant une accélération
très modérée).
Au niveau du freinage (en cas d’urgence par exemple), on constate que l’on peut
stopper le convoyeur en 2.3 cm seulement en émettant l’hypothèse que le couple de freinage
est égal à la moitié du couple moteur.
La puissance motrice nécessaire est donc (en première approximation) estimée à :
max
max max max
1 1 0.06 1
40 75
0.04 0.8
méca roue méca
V
P C C W
r

B. Architecture 1
La puissance mécanique est directement issue de la conversion de l’énergie électrique
en énergie mécanique par le biais d’un moteur électrique suivi d’un ensemble transmission
réduction.
1. Transmission
La transmission est placée directement sur l’arbre de sortie du moteur puis va vers le
réducteur. Cela se justifie par le fait que la vitesse de rotation sera plus élevée (donc un couple
faible) réduisant les dimensions de l’arbre de transmission.
Dans ce pré dimensionnement, la technologie utilisée n’a pas d’importance.
2. Réducteur
La gamme de vitesse des moteurs – frein de Leroy Somer est aux alentours de 2800
rpm – 3000 rpm contre environ 14.3 tours par minute au niveau de la roue du convoyeur.
C’est pourquoi, il est nécessaire d’utiliser un réducteur à grand rapport de réduction. En effet
2800 195.8
14.3
ce qui représente une très grosse réduction.
Exemple : si on désirer effectuer cette réduction avec deux trains épicycloïdaux de
type I en série, il nous faut une réduction par train de 14 environ. Soit
14 13 13
e e s
e s s
ss
on retrouve la formule Willis pour un train de
type I ayant comme entrée le solaire et comme sortie le porte satellites (la couronne étant
bloquée). La raison est
13
couronne
solaire
Z
Z
. Si on se fixe 21 dents pour le solaire, on obtient 273
dents pour la couronne. Le diamètre extérieur de la couronne est proche de
3 273
2 1.25 2 1.25 3 827
22
o cour o
mZ m mm
ce qui est énorme ! Il faut donc
envisager trois trains épicycloïdaux en série afin de réduire l’encombrement ; soit 21 dents au
solaire, 101 dents à la couronne pour un diamètre extérieur proche de 300 mm.
Toutefois, la nettement plus coûteuse gamme de moteurs à 4 pôles et la gamme des
moteurs de translation se contentent de tourner à 1400 rpm environ. Néanmoins, il serait
toujours difficile d’envisager une réduction sur deux étages de trains épicycloïdaux : Zsolaire
= 21 dents, Zcour = 187 dents, Dext = 580 mm environ !
Enfin, on peut facilement envisager une transmission par roue – vis sans fin afin
d’atteindre facilement la réduction demandée. Ex, avec un seul filet, il ne suffit que de 200
dents environ sur la roue pour obtenir un rapport de réduction de 200. Cependant, cette
solution est moins séduisante mécaniquement parlant.
 6
7
6
7
1
/
7
100%