Machines Asynchrones Triphasé

Machine Asynchrone Triphasé
1 sur 6
Machine Asynchrone Triphasé
I ) Besoin
Les besoins très variés dans le domaine des
entraînements mécaniques imposent, pour
répondre à la fonction Convertir, l’emploi des
moteurs présentant les critères suivants :
simplicité de fabrication
robustesse
mise en œuvre aisé
gamme de puissance élevée
bonne performance dynamique
Le moteur asynchrone triphasé répond à ces
impératifs. Il est très utilisé dans les
applications industrielles (pompage, ventilation,
levage, tapie roulant, assenceur…).
Alimentation
La machine synchrone triphasée comme son nom l’indique est alimenté en triphasé. Une alimentation
triphasée est constituée de trois sources de tension sinusoïdale déphasée d’un tiers de période (voir
figure 1 et 2), comme celles délivrées par le réseau EDF. L’utilisateur d’une alimentation triphasé
dispose donc, de quatre fils de connections : trois phases et un neutre.
En France les générateurs délivrent des tensions simples V1, V2 et V3 dont la valeur efficace est
généralement de 230v et la fréquence de 50Hz, on appelle tension simple les tensions entre l’une des
phases et le neutre. Les tensions composées sont U12, U13 et U23, ce sont les différences de
potentielle entre deux phases et ont une valeur efficace de 230.√3 soit ≈400v.
V1
V2
V3
PH1
PH2
PH3
N
U12
U23
U13
V1
V2
V3
V1
V2
V3
t
Figure 1 Figure 2
Principe de fonctionnement :
Si l’on alimente trois bobines
identiques placées à 120° par une
tension triphasée, les bobines vont
créer un champ tournant et si l’on
place un disque métallique dans ce
champ tournant le disque va tourner
dans le même sens que le champ
tournant (loi de Lenz).
La caractéristique des signaux de
commande qui agit sur la vitesse de
rotation du moteur est donc la
fréquence
La vitesse dépend de la fréquence
Figure 3

Machine Asynchrone Triphasé
2 sur 6
La vitesse du champ tournant est appelée aussi vitesse de synchronisme. Elle est notée nS en tour
par seconde ou ΩS en radian par seconde.
nS = f/p ΩS = 2.π.f/p
f : fréquence du réseau en Hertz - p : nombre de paires de pôles par phase
La vitesse du rotor d’un moteur asynchrone est toujours inférieure à la vitesse de synchronisme à
cause d’un phénomène que l’on appel glissement. Ce glissement exprime la perte de vitesse entre le
rotor et le stator.
g = (nS - nR) / nS
nS : vitesse de synchronisme - nR : vitesse de rotation du rotor
Exemples
Fréquence du réseau
50
50
50
50
Hz
Nombre de pôle
4
2
8
Glissement
2,7
3,5
4,7
%
Vitesse de synchronisme
tr/mn
Vitesse du rotor
965
2910
tr/mn
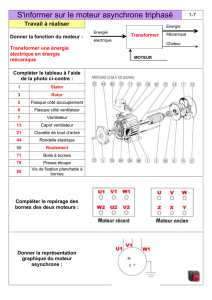
Câblage :
Types de couplage
Sur la planchette à bornes (figure 4) se
trouvent les bornes de connections
aux enroulements. Il y a donc 6 bornes
(deux par bobinage) et une borne de
terre.
Il existe seulement deux possibilités
pour raccorder les trois enroulements
statoriques sur un réseau triphasé : le
couplage étoile (figure 5) ou le
couplage triangle (figure 7).
U
V
W
Z
X
Y
Planchette à Bornes
Figure 4
PH1
PH2
PH3
Couplage Etoile
N
I
V
J
Figure 5
PH1
PH2
PH3
Couplage Etoile
N
U
V
W
Z
X
Y
Figure 6

Machine Asynchrone Triphasé
3 sur 6
Couplage Triangle
PH1
PH2
PH3
U
J
I
J =
I
3
Figure 7
PH1
PH2
PH3
Couplage Triangle
N
U
V
W
Z
X
Y
Figure 8
Réaliser le câblage des planchettes à bornes
pour un couplage en étoile sur la figure 6 et
pour un couplage en triangle sur la figure 8.
Quelle est la différence entre ces deux
câblages ?
_____________________________________
_____________________________________
_____________________________________
_______________________
Pour inverser le sens de rotation du moteur il
suffit d’inverser deux phases, réaliser cette
inversion sur le schéma de la figure 9, pour un
couplage en triangle.
PH1
PH2
PH3
Couplage Triangle
N
U
V
W
Z
X
Y
Figure 9
Démarrage étoile-triangle
Le couple important au démarrage d’un moteur asynchrone, provoque un à-coup parfois néfaste sur la
partie opérative, pour palier à cet inconvénient un démarrage en deux temps est utilisé sur un moteur
fournissant sa pleine puissance lorsqu’il est couplé en triangle :
Dans un premier temps, le moteur démarre couplé en étoile, il est sous alimenté.
Dans un deuxième temps, il est couplé en triangle et fournit alors sont couple nominal.

Machine Asynchrone Triphasé
4 sur 6
Puissances :
La puissance électrique absorbée est la somme des trois puissances absorbées par les trois
enroulements du moteur soit :
Câblage en étoile Câblage en triangle
Pa = 3.V.I.cos(φ) Pa =
3
.U.I.cos(φ)
V : tension simple / U : tension composée / I : courant en ligne / J : courant dans un enroulement
φ : déphasage en courant et tension / cos(φ) : facteur de puissance
La puissance mécanique utile est :
Pu = Ω. T
T : couple sur l’arbre en N.m / Ω : vitesse en rd/s
Le rendement du moteur est :
η = Pu/Pa
Plaque signalétique
V
Hz
Min-1
kW
cos
A
220
50
2780
0,75
0,86
3,3
Y 380
1,9
230
50
2800
0,75
0,86
3,3
Y 400
1,9
240
50
2825
0,75
0,86
3,3
Y 415
1,9
Quelle est la puissance mécanique utile sur
l’arbre ?
Peut-on utiliser un réseau 400v entre phases
pour alimenter ce moteur en directe et quel
couplage faut-il utiliser ?
Quelle est la vitesse de rotation du rotor en
tr/mn et en rd/s ?
Quelle est l’intensité absorbée par ce moteur
sur un réseau 400v avec en couplage en
étoile ?
Quel est le facteur de puissance de ce
moteur ?
Calculez la vitesse du champ statorique.
Calculer le glissement.
Calculer le couple utile sur l’arbre.
Calculer la puissance absorbée par ce moteur.
Calculer le rendement de ce moteur.

Machine Asynchrone Triphasé
5 sur 6
Commande du moteur
Démarrage direct à deux sens de marche
M
3~
L1
L2
L3
Q1
KM1
KM2
F2
N
S2
KM1
S3
KM2
F1
F2
KM1
KM2
KM1
KM2
S1
T
Q1
t
S1
t
S2
t
S3
t
F2
t
KM1
t
KM2
t
Description des éléments :
M :
Q1 :
KM1, KM2 :
F1 :
F2 :
T :
S1 :
S2 :
 6
6
1
/
6
100%