II. Application à la focométrie - PCSI

1
TP d’optique n°3 :
Lunette de visée, collimateur, viseur. Application à la focométrie
Introduction.
L’objectif de ce TP est d’étudier des dispositifs optiques utilisés pour la mesure de focales de
lentilles, de distances et de grossissement.
Remarque : selon les cas, vous devrez ou non mettre un dépoli devant l’objet ou après la
source. L’absence de dépoli vous permettra d’obtenir des images plus nettes, mais le flux
lumineux sera plus important et plus gênant.
I. Étude des dispositifs
A. Etude de la lunette de visée
Le principe de la lunette de visée repose sur celui de la lunette astronomique du TP O2. On
retrouve un objectif et un oculaire, réalisés par deux lentilles minces convergentes qui seront
appelées Lob pour l’objectif et Loc pour l’oculaire.
Rappelons que le but d’une lunette est de pouvoir voir un objet situé à l’infini sans que l’oeil
ait besoin d’accommoder : le système doit donc être afocal. Il faut alors faire correspondre le
foyer image de l’objectif avec le foyer objet de l’oculaire, ces deux parties étant mobiles.
Un objet, appelé réticule (généralement une règle graduée), est placé entre les deux lentilles.
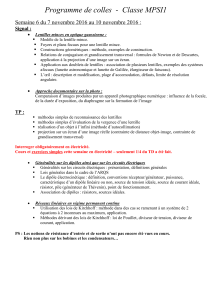
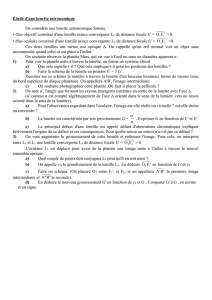
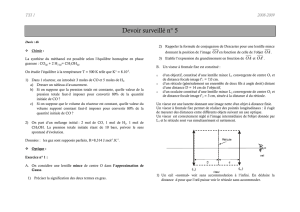
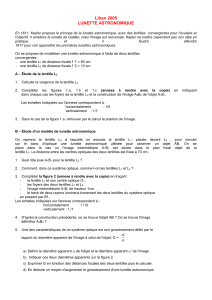
Le principe de réglage d’une lunette est exposé sur la figure 1.
1. Préparation :
Une lunette de visée à l’infini virtuelle est disponible à l’adresse :
http://www.sciences.univ-
nantes.fr/sites/genevieve_tulloue/optiqueGeo/instruments/reglage_lunette.html.
En utilisant les indications précédentes et les indications du site, régler cette lunette
virtuelle de manière à observer une image nette de l’arbre. Indiquer le sens de l’image de
l’arbre donnée par la lunette.
En considérant le système afocal réalisé par les deux lentilles, tracer le chemin d’un
rayon incliné par rapport à l’axe, d’un angle .
Que peut-on dire concernant l’image donnée par un tel système ?
Peut-on observer avec un tel système un objet à une distance finie de l’objectif ?
2. Manipulation.
Régler la lunette en visant un objet lointain (arbre par la fenêtre, dessin au tableau ...)

2
Réglage d’une lunette de visée :
lunette non réglée : le réticule
est situé entre les lentilles, à une
position quelconque
on positionne le réticule dans le
plan focal objet de l’oculaire, en
déplaçant ce dernier. L’image du
réticule doit être vue, par l’oeil,
nette et sans effort.
on positionne le réticule dans le
plan focal image de l’objectif, en
déplaçant ce dernier : l’image d’un
objet à l’infini doit être vue, par
l’oeil, nette et sans effort.
Fig. 1 : Réglage de la lunette de visée à l’infini
B. Etude du collimateur
Un collimateur est un dispositif optique permettant de créer un objet à l’infini. L’objet est
souvent une croix ou une mire plus précise. Les collimateurs que vous utilisez sont déjà
réglés.
1. Préparation :
Quel dispositif simple permet de créer une image à l’infini ?
2. Manipulation
Placer sur le banc d’optique : le collimateur à la place de la lampe (n’oubliez pas de le
brancher !) et la lunette à l’autre bout.
Visualiser la croix. Si celle-ci n’apparait pas ou n’est pas nette, vous devrez modifier
légèrement le réglage de l’objectif.
Une fois l’objectif réglé, vous ne devrez plus toucher au réglage de la lunette à l’infini.
Loc
02
F2
F'1
Lob
01
réticule (fixe)
Loc
02
F2
F'1
Lob
01
Loc
02
F2
F'1
Lob
01=
(a) Lunette non réglée
(b) Réglage de l'oculaire
(c) Réglage de l'objectif
Loc
02
Loc
02
F2
F'1
Lob
01
Lob
01
réticule (fixe)
Loc
02
Loc
02
F2
F'1
Lob
01
Lob
01
Loc
02
Loc
02
F2
F'1
Lob
01
Lob
01=
(a) Lunette non réglée
(b) Réglage de l'oculaire
(c) Réglage de l'objectif

3
C. Etude d’un viseur
L’inconvénient majeur de la lunette est de ne pas pouvoir visualiser des objets à distance
finie.
Pour remédier à ce problème, on place juste devant l’objectif une lentille convergente Lb
(focale f’b = + 100 mm). Cette lentille doit produire une image à l’infini d’un objet situé à
une distance finie de la lunette. Elle est appelée bonnette et se fixe à l’avant de la lunette.
1. Etude théorique
Quelle distance doit séparer l’objet que l’on cherche à visualiser et la bonnette, afin de
récupérer une image nette en sortie de la lunette?
En considérant un objet AB situé dans le plan focal objet de Lb, déterminer sur un
schéma son image par Lb.
Que devient cette image par la lunette (préalablement réglée à l’infini) ? Compléter les
trajets des rayons sur votre graphique précédent.
2. Manipulation
Sans modifier les réglages précédents de votre lunette, placer la bonnette à l’avant.
Insérer un objet entre la lampe et la lunette.
Modifier la position de la lunette sur le banc afin de voir nette l’image de l’objet.
Évaluer la distance objet-bonnette et conclure.
II. Application à la focométrie
Une des applications des lunettes de visée est la détermination des focales des lentilles. Nous
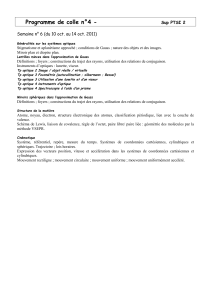
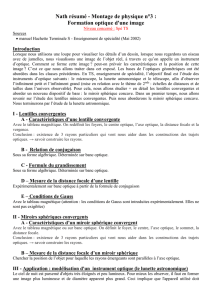
allons voir différentes méthodes. Le montage expérimental est représenté sur la figure 2.
Fig. 2 : Montage expérimental pour la détermination de focales.
A. Méthode de l’objet à l’infini
Manipulation :
En utilisant le collimateur, réaliser un objet à l’infini puis déterminer la position :
- de la lentille (on repèrera l’image par le viseur des défauts de surface de la lentille)
- du plan focal image d’une lentille (convergente) à l’aide du viseur.
- en déduire la distance focale de la lentille. Evaluer l’incertitude qui porte sur votre de
votre mesure en utilisant les indications du TP O2.
Refaire l’opération pour une lentille divergente.
Lob Loc
F'ob=Foc
Lb
lunettebonnette
viseur
L
A
BLob Loc
F'ob=Foc
Lb
lunettebonnette
viseur
L
A
B

4
B. Méthode de Bessel
On reprend dans cette partie la méthode de Bessel vue au TPO1.
1. Préparation :
Rappeler le principe de la méthode de Bessel ainsi que les formules permettant de
déterminer la focale d’une lentille.
Représenter sur un schéma le tracé des rayons correspondant à l’une des deux
positions donnant une image nette sur un écran. Si on remplace l’écran par un viseur, à
quelle distance de l’image nette (donc de la position de l’écran) doit être placée la
lunette (plus précisément la bonnette) ?
Compléter sur le schéma précédent le trajet des rayons formant une image nette par la
lentille et traversant ensuite le viseur (bonnette+lunette).
2. Manipulation
On cherche à déterminer la focale de la lentille L1.
Placer après la lampe un objet
Déterminer la position xA du viseur repérant la position de l’objet (il faut avoir une
image nette avec la lunette).
Placer le viseur à une distance 70cm ou 80cm environ de xA. Soit xA’ cette position.
Faire figurer sur le schéma précédent les positions xA et xA’, par rapport aux positions
de l’objet et de l’écran. En déduire la distance D.
Insérer la lentille à caractériser entre l’objet et le viseur
Chercher les deux positions permettant d’obtenir une image nette à l’aide du viseur.
En déduire la distance focale de la lentille L1. Evaluer l’incertitude qui porte sur cette
mesure.
Expliquer pourquoi on a demandé d’éloigner le viseur de 70 à 80 cm de la position de
l’objet.
C. Méthode par pointés longitudinaux.
Cette méthode permet de caractériser une lentille aussi bien convergente que divergente.
1. Préparation
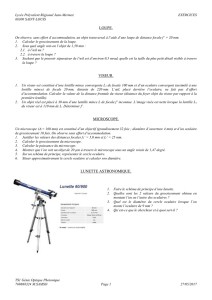
A l’aide du viseur, on va successivement chercher les positions relatives des différents
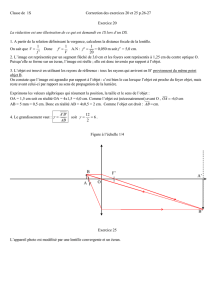
éléments par rapport à la lunette (figure 3):
(a) de l’objet : position repérée par l’abscisse xA du viseur
(b) de la lentille à caractériser : position repérée par l’abscisse xO du viseur
(c) de l’image de l’objet par la lentille : position repérée par l’abscisse xA’ du viseur

5
Fig. 3 : Mesure des 3 distances à l’aide de la lunette
Quel que soit l’objet repéré par le viseur (objet A, lentille ou image A’ de l’objet A par
la lentille), quelle distance d sépare cet objet de la bonnette ?
Exprimer
OA
en fonction de xA et xO
Exprimer
'OA
en fonction de xA’ et xO
En appliquant la relation de conjugaison, donner la relation entre la focale f’ de la
lentille, xA, xA’ et xO
2. Manipulation
Positionner un objet après la lampe
Repérer la position xA du viseur donnant une image nette de l’objet
Placer la lentille L1 à environ 20 cm de l’objet.
Repérer la nouvelle position xO du viseur donnant une image nette de la lentille. Pour
cela, on cherchera à visualiser les défauts de surfaces de la lentille (poussières,
rayures, etc ...) avec le viseur. En déduire la mesure
OA
(vérifier qu’elle est cohérente
en valeur et en signe)
En reculant le viseur, repérer la position xA’ du viseur donnant une image nette (par le
viseur) de l’image de l’objet par la lentille. En déduire la mesure
'OA
.
En déduire f’
Refaire les mesures pour la lentille divergente D et conclure.
x
x
x
xA
A
A
A
O
OA'
xO
xA'
d
d
d
(a)
(b)
(c)
x
x
x
xA
A
A
A
O
OA'
xO
xA'
d
d
d
(a)
(b)
(c)
 6
7
6
7
1
/
7
100%