J. Monnier, I. Gejadze, M. Honnorat, FX. Ledimet

ASSIMILATION DE DONNEES VARIATIONNELLE POUR DES MODELES
D’HYDRAULIQUE FLUVIALE
J. Monnier, I. Gejadze, M. Honnorat, FX. Ledimet
LMC-IMAG, projet MOISE, BP 53, 38041 Grenoble cedex 9, France
Résumé. Nous présentons une synthèse de trois études menées autour de l’assimilation de
données, basée sur le contrôle optimal d’équations aux dérivées partielles, et appliquées aux écoulements
de rivières (shallow water 1D casier et 2D). Dans une première étude, nous appliquons les techniques
standards avec comme seules observations quelques mesures de hauteur (données académiques et
réelles). La seconde étude traite de l’assimilation de trajectoires lagrangiennes de surface (extraites de
données vidéo). La troisième étude traite d’un algorithme combiné de couplage shallow-water 1D casier-2D
et d’assimilation.
Mots-clefs. Assimilation de données variationnelle, hydraulique fluviale, identification/calibrage,
données lagrangiennes, modèles shallow-water 1D casier–2D, algorithme combiné couplage-assimilation.
1 Introduction
En hydraulique fluviale, les observations ne sont généralement constituées que de mesures
de hauteur d’eau, quasi-continues en temps mais très peu dense en espace (peu de stations de
mesures), tandis que les mesures de vitesse sont quasi inexistantes. Cette faible densité
d’observations est d’autant plus marquée lors des événements qui nous intéressent, à savoir les
crues. Notre objectif est d’améliorer la prévision numérique des écoulements d’une part en estimant
mieux les débits entrants, les coefficients de rugosité et la topographie ainsi que la condition
initiale, et d’autre part en couplant les modèles 1D casier et 2D lorsque cela s’avère nécessaire (lit
mineur et débordement en lit majeur). Nous employons dans cette étude la méthode dite 4D-var
basée sur le contrôle optimal de systèmes régis par des EDP. Nous montrons sur un cas test réel
(Pearl River) les potentialités et les limitations de cette approche dans le cas de l’identification de
débits amont. Puis, nous introduisons la dynamique de particules dans le modèle direct et les
observations (données lagrangiennes). Enfin, nous élaborons une méthode de couplage faible qui
s’avère particulièrement efficace pour des grilles spatio-temporelles inconsistantes et en présence de
données à assimiler.
2 Modèle direct, adjoint et logiciel de calcul Dassflow
Nous considérons le modèle de shallow-water 2D sous forme conservative et en variables
vitesse u, débit q, et avec un terme de friction (Manning). Les équations sont :
où zb est la topographie, n le coefficient de Manning, (h0,q0) les conditions initiales. Les conditions
aux limites sont les suivantes:
ou encore de type caractéristique (voir section couplage plus loin). Nous résolvons numériquement
ces équations à l’aide du schéma d’Euler explicite en temps et d’un schéma volumes finis d’ordre 1
en espace, sur un maillage déstructuré mixte triangles - quadrangles. Sur chaque arête nous nous
ramenons à un problème de Riemann 1D résolu à l’aide du solveur approché HLLC. Le terme de
friction est traité de manière semi-implicite.
Dans le cadre de la méthode 4D-var employée ci-dessous, nous minimisons des fonctions
coûts à l’aide d’un algorithme quasi-Newton L-BFGS. Les modèles adjoints nécessaires au calcul
des gradients sont obtenus par différenciation automatique avec le logiciel Tapenade (projet

TROPICS, INRIA). Le logiciel Dassflow sera très prochainement disponible en ligne,
[HoLoMoLe05]. Ce logiciel inclus l’assimilation de données lagrangiennes ainsi que le couplage
faible 1D-2D (cf plus loin). Pour la fonctionnelle coût globale :
Nous montrons aisément que :
où les variables ~ correspondent aux variables adjointes.
3 Identification du débit amont via l’observation de quelques points de hauteur
Nous cherchons à identifier le débit mont d’un écoulement 2D, ce débit étant la condition au bord
entrant. Dans un premier temps, nous considérons une expérience jumelle (les observations sont
crées par le modèle). Nous minimisons la fonctionnelle coût par rapport à la condition entrante q:
Où hobs désigne un unique point de hauteur observé en tout temps. Sur la figure 2, est présenté la
valeur du contrôle q, la surface libre à différents instants ainsi que l’évolution du coût et du gradient
au cours des itérations de minimisation. Nous retrouvons parfaitement l’onde de crue recherchée.
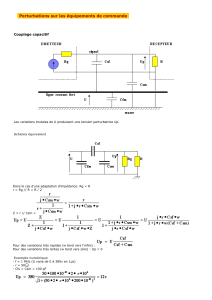
Cas test réel : Pearl River (Chine)

Nous appliquons à présent la même méthode à l’écoulement de la Pearl river, écoulement
principalement dirigé par les conditions de marée en BC6, cf Fig. ci-dessus. Nous disposons comme
observations les hauteurs d’eau aux 3 stations de mesure A, B et Cen tout temps. Nous cherchons à
identifier les hauteurs d’eau en BC1, BC2 et BC6 (les autres conditions aux limites étant connues)
et aussi la condition initiale. La hauteur d’eau en BC6 est parfaitement retrouvée, cf Fig., tandis que
celles en BC1 et BC2 le sont beaucoup moins. En effet, les écoulements aux stations de mesure sont
principalement dirigés par la condition en BC6 et ne sont que très peu sensibles aux conditions en
BC 1 et BC2. Remerciements auprès de X. Lai, académie des sciences de Chine, pour ces données.
4 Assimilation de trajectoires lagrangiennes de surface
A présent, nous considérons comme observations supplémentaires N trajectoires de particules de
surface (qui peuvent être extraites d’images vidéo). Nous enrichissons alors le modèle direct
shallow-water des N EDOs de transport suivantes :
Où ti0 et tif désignent les temps initiaux et finaux d’observation de chaque particule. Nous
considérons la fonction coût :
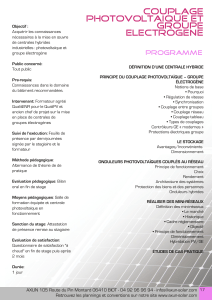
Le modèle adjoint et les gradients considérés sont bien sûr recalculés. Nous présentons ci-dessous un
résultat d’identification d’une topographie locale. L’apport de l’information portée par la dynamique de ces
particules (position initiale marquée par les ronds noirs, fig. gauche) s’avère ici nécessaire pour pouvoir
identifier la topographie du lit (fig. droite). Dans le cas de trajectoires réelles, se pose le problème de la
modélisation des écoulements de surface. Pour l’instant, nous avons élaboré une méthode simple de
filtrage. Aussi, notons que d’autres expérimentations numériques montrent que cette information de type
trajectoire peut être utile pour une meilleure identification du débit entrant.
5 Algorithme combiné couplage 1D casier/2D – assimilation
Dans cette étude, nous élaborons un algorithme de couplage des modèles shallow-water 1D
casier et shallow-water 2D, basé sur le contrôle optimal. Le modèle 2D joue un rôle de zoom local
dans les casiers tandis que le modèle de réseau global 1D casier tourne indépendamment. Le
couplage entre le 2D et le 1D s’effectue au travers de termes sources des équations 1D, termes qui
modélisent la perte de charge et quantité de mouvement (modèles à casiers). Le couplage entre le
1D et le 2D s’effectue ici au travers des conditions aux bords du type caractéristiques :

Nous relaxons le couplage fort des modèles 1D et 2D en relaxant ces dernières conditions.
Plus précisément, nous considérons le modèle faiblement couplé 2D1D (ie conditions 1D2D
relaxées) que nous contrôlons à l’aide des caractéristiques 2D entrantes. L’algorithme est alors le
suivant :
L’itération du processus d’optimisation a fourni un jeu de caractéristiques 2D entrantes wk,
k=1..4, sur les bords Gamma 3 et 4.
a. Résoudre le modèle shallow-water 2D,
b. Etant donné les termes sources du modèle 1D (issus du 2D), et les caractéristiques 1D
entrantes Wk, k=1..2, aux extrémités de la rivière ie en x=0 et L’, résoudre le modèle
shallow-water 1D,
c. Evaluer la fonction coût de couplage « faible » suivante :
où Wk, k=1,2, sont les caractéristiques 1D entrantes sur les bords Gamma 3 et 4.
e. Résoudre le modèle adjoint correspondant à ce modèle relaxé 2D1D et calculer le
gradient de la fonction coût.
f. Réitérer selon l’algorithme de minimisation L-BFGS.
Ce procédé de couplage « faible » prend tout son sens d’une part lorsque nous y associons
l’assimilation variationnelle de données (ce qui s’effectue simplement en ajoutant à Jk, k=1,2, une
fonction coût habituelle mesurant la différence entre les observations et la solution), et d’autre part
lorsque les grilles spatio-temporelles 1D et 2D sont non concordantes (typiquement de ratio 10 en
espace et 100 en temps). Dans ce cas, cet algorithme s’avère plus performant et moins coûteux
qu’un algorithme d’assimilation variationnelle sur un modèle couplé avec une méthode de Schwarz.
Nous présentons dans la figure de droite les résultats numériques obtenus lors d’un tel couplage tout
en assimilant deux points de hauteurs d’eau se situant dans le canal et dans la zone inondée. La
variable de contrôle supplémentaire étant ici les caractéristiques 1D entrantes Wk, k=1..2, aux
extrémités de la rivière ie en x=0 et L’.
Références
o [GeMo06] I. Gejadze, J. Monnier. “On data assimilation for a 1D-net river
model with 2D zoom areas”. In Proceedings of Computational Methods for Water
Ressources CMWR XVI, 2006
o [LoHoMoLe]Y. Loukili, M. Honnorat, J. Monnier, FX LeDimet « DassFlow: un
modèle direct et inverse d'ecoulements St-Venant 2D», Rapport de recherche
INRIA RR-5756, novembre 2005.
o [HoLaMoLe06] M. Honnorat, X. Lai, J. Monnier, and FX LeDimet.
« Variational data assimilation for 2D fluvial hydraulics simulation ». In
Proceedings of Computational Methods for Water Ressources CMWR XVI, 2006
1
/
4
100%