1 S

GERMAIN Lydie Page 1/4 17/04/2017
1 S
ÉNERGIE CINETIQUE ET
ENERGIE POTENTIELLE DE PESANTEUR
P 7
Objectifs :
Utiliser l’expression de l’énergie cinétique d’un solide en translation. Mettre en œuvre un dispositif décrit.
Utiliser le fait qu’entre deux positions, dans un référentiel galiléen, la variation de l’énergie cinétique d’un
solide en translation est égale à la somme des travaux des forces extérieures.
Utiliser l’expression de l’énergie potentielle de pesanteur d’un solide au voisinage de la Terre.
Expliciter la transformation d’énergie potentielle en énergie cinétique dans des cas simples.
TP 1 Travail d’une force et énergie cinétique
1.Travail et énergie cinétique
1.1.Énergie cinétique d’un solide en translation
Nous avons vu en TP que pour un solide, en translation rectiligne ; soumis à une force constante
F
:
L’énergie cinétique, par rapport à un référentiel R, du solide de masse m, en mouvement de translation
de vecteur vitesse
V
par rapport à R est donnée par la relation :
2
V m
2
1
Ec
Ec énergie cinétique en joule (J)
M masse du solide en kg
V vitesse du solide en m/s
Dans un référentiel galiléen, la variation de l’énergie cinétique d’un solide en translation entre deux
positions A et B est égale au travail de la force extérieure s’exerçant sur le solide.
B A AB
Ec Ec W (F)
soit
22
B A AB
11
mV mV W (F)
22
1.2.Chute libre
Chute libre avec capture et traitement informatique.
On laisse tomber une bille devant une série de capteur
Calcul de V², calcul de
hgm)z(zgm)PW( BA
ou plutôt W/m.
Tracer de V²=f(t) et W/m=f(t) : les deux courbes ont la même allure.
Calcul de V²/W : on trouve une valeur constante est égale à 0,5.
Dans le cas d’une chute libre :
La variation d’énergie cinétique du solide en chute libre entre deux positions A et B est égale au travail du
poids de ce solide pour le déplacement AB :
22
B A AB
11
mV mV W (P)
22
Remarque : Lors du TP sur la deuxième loi de Newton, nous avons trouvés que pour une chute libre sans
vitesse initiale
h g 2V2
.
Les conditions expérimentales étaient telles que à
0t
0VA
et
AB
h z z
Donc
)P(ΣWmV
2
1
mV
2
1AB
2
A
2
B
devient
2 2 2
B B B
11
m V m g h V g h V 2 g h
22
.
On retrouve la relation du TP..
1.3.Généralisation
« Théorème de l’énergie cinétique » :
Dans un référentiel galiléen, la variation de l’énergie cinétique d’un solide de masse m en translation
entre deux positions A et B est égale à la somme des travaux des forces extérieures s’exerçant sur le
solide.
)F(ΣWEcEc extABAB
soit
)F(ΣWmV
2
1
mV
2
1extAB
2
A
2
B
C’est le travail des forces extérieures appliquées qui fait varier l’énergie cinétique du solide.
Si ce travail est positif, l’énergie cinétique augmente et si le travail est négatif, l’énergie cinétique
diminue.
Un transfert d’énergie s’effectue donc du fait du travail des forces extérieures : on dit que le travail
mécanique est un mode de transfert de l’énergie.
Ex 3, 5, 6, 16, 25 p 126

GERMAIN Lydie Page 2/4 17/04/2017
2. Travail et énergie potentielle de pesanteur
2.1. Découverte de l’énergie potentielle
On considère la situation suivante :
1° étape : sur un chantier, une grue soulève
une caisse de masse 100 kg depuis le sol
jusqu’au bord de la plate-forme finale d’un
immeuble, situé 20 m plus haut. Elle exerce
ainsi une force
F
sur la caisse par
l’intermédiaire d’un câble.
2° étape : mal positionnée, la caisse d’abord
immobile, bascule dans le vide et s’écrase sur
une voiture stationnée au bas de l’immeuble.
On veut étudier le mouvement du système
{caisse} dans le référentiel terrestre entre les états suivants :
État A : caisse immobile sur le sol.
État B : caisse immobile sur la plate-forme.
État C : caisse immobile au sol après le choc avec la voiture.
1°/ Représenter sur les
schéma, les forces extérieures
exercées, sur la caisse, entre
les états A et B, puis entre les
états B et C.
Entre les états A et B
Entre les états B et C
2°/ On dit qu’un système possède de l’énergie s’il est capable de fournir du travail au milieu extérieur.
2.1. Que peut-on dire de l’énergie cinétique du système dans l’état A ? dans l’état B ? dans l’état C ?
Dans ces trois état, la vitesse étant nulle, l’énergie cinétique est nulle.
2.2. Le système possède-t-il de l’énergie dans l’état A ? dans l’état B ? dans l’état C ? Justifier.
Le système ne possède pas d’énergie en A ni en C car il ne peut pas fournir de travail.
Par contre, il possède de l’énergie en B puisqu’il peut ensuite fournir le travail d’écrasement de la voiture.
Cette énergie est appelée énergie potentielle de pesanteur notée Epp.
2.3. Si la hauteur de l’immeuble était plus grande, l’énergie potentielle serait égale ? inférieure ?
supérieure ?
Si la hauteur de l’immeuble était plus grande, l’énergie potentielle de pesanteur serait supérieure.
L’énergie potentielle de pesanteur dépend de la hauteur de chute.
2.2.Calcul de l’énergie potentielle de pesanteur
1°/ Donner l’expression du travail du poids lorsque la caisse passe de la position A à la position B. Ce
travail est-il moteur ou résistant ?
)z(z g mABPABP)P(W BAAB
,
BA zz
est négatif car la caisse monte, le travail du poids est
donc résistant.
2°/ En utilisant le « théorème de l’énergie cinétique », donner l’expression du travail de la force
F
exercée par le câble sur la caisse entre les états A et B. Ce travail est-il moteur ou résistant ?
)F(ΣWEcEc extABAB
soit
)F(W)P(WmV
2
1
mV
2
1ABAB
2
A
2
B
. En A comme en B, la caisse est
immobile, sa vitesse est nulle ainsi que son énergie cinétique.
L’expression devient
)z(z g m)z(z g m)P(W)F(W)F(W)P(W0 ABBAABABABAB
.
Le travail de la force exercée par le câble sur la caisse est un travail moteur car il positif.
3°/ 3.1. Quelle est la force dont le travail est à l’origine de l’augmentation de l’énergie potentielle
quand la caisse passe de l’état A à l’état B ?
La force dont le travail est à l’origine de l’augmentation d’énergie potentielle est la force
F
car c’est elle
qui permet le passage de A à B.
G
P
F
G
P
O
G
G
A
B
z
Sol

GERMAIN Lydie Page 3/4 17/04/2017
3.2. Proposer une expression pour la variation
AB EppEpp
de l’énergie potentielle.
L’énergie potentielle de pesanteur apparaît comme du travail stocké momentanément à la suite d’une
modification de position du système par rapport à la Terre.
La variation d’énergie potentielle est égale au travail de la force
F
donc
)z(z g mEppEpp ABAB
.
4°/ Comment la caisse peut-elle fournir du travail au milieu extérieur à partir de l’état B ?
La caisse peut restituer du travail si son altitude par rapport à la Terre diminue.
Donc quand la caisse tombe sur la voiture, elle restitue de l’énergie en fournissant un travail permettant
de déformer la voiture.
5°/ Faire les diagrammes énergétiques représentant le passage de l’état A à l’état B, puis pour le passage
de l’état B à l’état C.
Passage de A à B
Passage de B à C
2.3. Définition
L’énergie potentielle de pesanteur d’un solide est l’énergie que lui confère sa position par rapport à la
Terre. Elle résulte de l’interaction gravitationnelle entre le solide et la Terre.
La position du solide étant définie par l’abscisse z de son centre d’inertie G mesurée sur un axe Oz
ORIENTE VERS LE HAUT, l’énergie potentielle de pesanteur pour une altitude z quelconque est :
z g mEpp(z)
Epp(z) énergie potentielle de pesanteur en J
M masse du solide en kg
g intensité de la pesanteur en N/kg
z altitude du centre de gravité en m
2.4. Propriétés
L’énergie potentielle de pesanteur ne dépend pas de l’état de mouvement du solide : un solide dans un
état déterminer peut avoir de l’énergie cinétique et de l’énergie potentielle.
L’énergie potentielle de pesanteur intervient par ces variations : entre deux positions A et B
)z(z g mEppEppEpp ABAB
.
La variation d’énergie potentielle ne dépend pas du chemin suivi.
B A B A AB
ΔEpp Epp Epp m g (z z ) W (P)
3. Transformation d’énergie (cours ou TP)
3.1. Chute d’une balle avec vitesse initiale
Une balle est lancée vers le haut. (Voir vidéo chute parabolique 444 ou balle de golf)
La balle a une trajectoire parabolique.
La balle n’est soumise qu’à une force, son poids : elle est en chute libre.
Son mouvement peut être décomposé en deux phases : la montée et la descente.
Étude de la variation de son énergie potentielle et de son énergie cinétique.
Après capture des points par le logiciel Généris, on calcul
Ec
m
puis
Epp
m
et puis trace la variation de ces
deux grandeurs en fonction du temps.
caisse
C
Epp 0
B
Epp
voiture
W
grue
W
caisse
0EppA
B
Epp

GERMAIN Lydie Page 4/4 17/04/2017
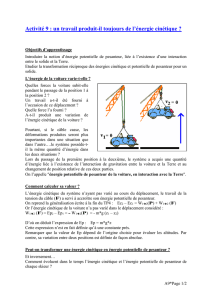
50 100 150 200 250 300 350 400 450 500 550 600 650
t (ms)
1,5
2,0
2,5
3,0
3,5
4,0
4,5
5,0
5,5
6,0
6,5
7,0
7,5
8,0 Epp, Ec (J)
Epp/m en J/kg
Variation de Ec/m et Epp/m
Ec/m en J/kg
Variation de Ec/m et Epp/m
On constate que l’énergie cinétique et l’énergie potentielle varient en sens inverse.
Toute l’énergie cinétique perdue pendant la montée se transforme intégralement en énergie potentielle.
Toute l’énergie potentielle perdue pendant la descente se transforme intégralement en énergie cinétique.
Diagrammes d’énergie :
Conclusion :
Un solide est en chute libre, s’il n’est soumis qu’a son poids.
Lors d’une chute libre, la somme
EppEc
des énergies potentielles et cinétiques reste constante. On dit
qu’elles se conservent, l’énergie potentielle de pesanteur du solide se transforme en énergie cinétique et
réciproquement.
3.2. Généralisation
Dans un référentiel terrestre, la somme
EppEc
des énergies cinétiques et potentielles d’un solide se
conserve lorsque les forces extérieures autres que le poids ne travaillent pas.
S’il y a des frottements, cette somme ne se conserve pas.
entre deux états A et B
pris pendant la montée
Ec
A
Ec
B
Boule
Ep
A
Ep
B
entre deux états A' et B'
pris pendant la descente
Ec
A'
Ec
B'
Boule
Ep
A'
Ep
B'
Ex 10, 11 p 124
Et le Polycopié
1
/
4
100%