Maintenance des interfaces

DOSSIER DE MAINTENANCE
INTERFACE ROBOTIQUE
MOEBUS &
SUPER MODULE DE COMMANDE
Mise à jour : Juin 2006

DOSSIER DE MAINTENANCE - Interfaces robotique 2
Introduction
Ce document à pour but de regrouper empiriquement les différentes pannes ayant été constaté
sur les interfaces robotique fabriquées par l’association Planète Sciences : Moebus et
SuperMEC.
J’invite les personnes qui répareront les interfaces à laisser leurs coordonnées dans ce tableau
afin que l’on puisse les contacter sur ce sujet dans le futur.
Méthode générale de maintenance
En reprennent la méthode scientifique expérimentale de l’association, nous pouvons trouver
facilement les causes d’une panne. Il faut :
OBSERVER
- Les commentaires notés sur le document de retour d’une interface défectueuse,
- Câbler une chaîne d’interfaçage : ordinateur + logiciel MSWLOGO, MOEBUS et
SuperMEC,
- Tester l’interface défectueuse dans tous ses modes de fonctionnement avec les autres
éléments de la chaîne validé pour leur bon fonctionnement, afin d’isoler les différentes
fonctions logiques en panne,
- Ne pas hésiter à agir physiquement sur la carte en la tapotant pour faire apparaître les
pannes mécaniques « intermittentes » existantes
- Noter sur papier ou dans un fichier les divers tests et les résultats obtenus (comme
dans ce document !),
HYPOTHESE
- Isoler sur le schéma électronique les fonctions repérées comme étant en pannes,
EXPERIMENTER
- Rechercher sur l’interface les composants entrant en jeu dans ces fonctions,
- Observer l’état physique des composants ; une bonne part des pannes est « visible »,
- Ré enfoncer les composants pouvant l’être
- Tester à nouveau l’interface
RESULTAT
- Voir s’il y a des améliorations dans le fonctionnement des interfaces
INTERPRETER
- Rechercher les autres composants électroniques pouvant intervenir sur une fonction en
panne,
Rédacteurs
Mail
Gwénaël Forestier
Octobre 2005
Alain Arnaudet
Secteur robotique
robotique@planete-sciences.org
Vous ?

DOSSIER DE MAINTENANCE - Interfaces robotique 3
CONCLURE
Tester à nouveau l’interface et recommencer s’il le faut
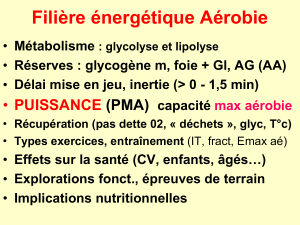
après l’apparition d’une panne secondaire.Montage
général de test
MOEBUS ---------------------------------------------------------------------------------
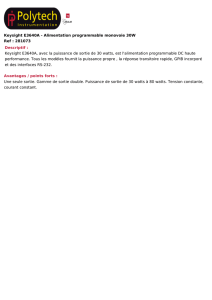
Implantation des composants
Description des fonctions électroniques
Module d’alimentation
Les deux diodes D1 et D2 servent de protection entre l’alimentation et le MOEBUS. La
tension d’alimentation après les diodes sera = Tension d’alimentation – 0.7volt (issue des
diodes).
Les diodes empêchent un courant de retour vers l’alimentation. Il y en a deux pour avoir plus
d’intensité.
Le système R5, C1, C2, D4 (diode zéner) et transistor T3 servent à réguler la tension
d’alimentation. La diode zéner donne la référence à T3, pour stabiliser la sortie à 5volts.
Câble Centronics
MOEBUS
fonctionnel
Alimentation
stabilisée
Ordinateur : avec la dernière version de
« Disk » www.ai.univ-paris8.fr/~tanguy/robot/
(MSWLOGO + fichier smec2.lgo), permettant
de tester plusieurs SuperMec en même temps.
Smec de référence = N°1 = DIP tous en en
OFF
Smec en dépannage= N°2 = DIP 1 en ON le
reste en OFF
Smec N°1 de référence
Smec N°2
Voltmètre
Référence à 0 Volts.
1 pointe de touche
MOEBUS
A tester

DOSSIER DE MAINTENANCE - Interfaces robotique 4
R8 et D3 (LED) servent de signalisation.
Transfert de donnée module I2C
Les deux schémas sont identiques. Leur fonction est d’amplifier le signal d’entrée/sortie des
lignes I2C.

Maintenance des interfaces robotique
Maintenance des interfaces robotique 5
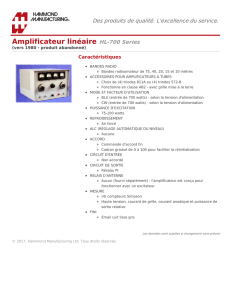
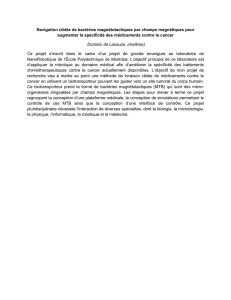
Mesure électriques prises sur un Moebus
Condition de test : sans charge ni instructions.
Appareil de mesure : voltmètre, avec la pointe de touche Noire (la référence) à la masse du montage.
Repère
Désignation
R1, R2
résistances 10 kO
R3, R4
résistances 1kO
R6, R7, R8
résistances 100 O
R5
résistance 330 O
D1, D2
diode 1N4004
D4
Zéner 6,3 Volts
D3
Led 5mm rouge
C1
condensateur 100µF
C2
condensateur 330 nF
T1, T2
transistor NPN 2N2222
T3
Darlington BDX33 ou BD245
connecteur 1 et 2
fiches bananes femelles
connecteur 3
prise châssis Centronics
connecteur 4
fiche modular Jack 6p4c
Attention
La tension d’alimentation lors de
vos tests peut être un peu
différente de celle noté sur
l’exemple. En conséquence, les
mesures prises sur les points de
tests devront être adaptées.
LES PANNES du MOEBUS ---------------------------------------------------------------------------
GF Panne identifiée : un transistor arraché.
Cause probable : mauvaise manipulation de l’interface.
- Identification visuelle des références du transistor considéré.
Résistances O transistor 2
O O
Diode Zéner
O Transistor 1 condensateur
O O
Résistances LED
Condensateur 1.86V OOO Transistor 3
Alimentation I2C
Diodes
6.52V
4.56V
15.56V
5.54V
0V = Référence
Prise informatique « Centronics »
Tension
d’entrée
= 16.23 volts
 6
7
8
9
10
11
12
13
14
15
16
6
7
8
9
10
11
12
13
14
15
16
1
/
16
100%