- Free Documents

Rpublique Algrienne Dmocratique et Populaire
Ministre de l Enseignement Suprieur et de la recherche Scientifique Universit MENTOURI de
CONSTANTINE Facult des Sciences de L ingnieur Dpartement d Electrotechnique N d ordre
Srie
Mmoire
Prsent en vue de l obtention du diplme de magister en Electrotechnique
Option Machines lectriques dans leurs environnements. Par
Naouel HAMDI
Modlisation et commande des gnratrices oliennes
Soutenu le //
Devant le jury Prsident Rapporteur Mohamed EL Hadi LATRECHE BOUZID AISSA Prof. L
Universit de Constantine Prof. L Universit de Constantine Prof. L Universit de Constantine
MC. L Universit de Constantine
Examinateurs BENALLA HOCINE Examinateurs Mohamed BOUCHERMA
Sommaire
INTRODUCTION GENERALE Page
Chapitre tat de l art des gnratrices oliennes
. Introduction .production olienne .dfinition de l nergie olienne . principe de fonctionnement d
une olienne . . les diffrents types des turbines oliennes .les oliennes axe verticale .les
oliennes axe horizontal . principaux composants d une olienne a le mat b la nacelle c le rotor
c. les rotors vitesse fixe c. les rotors vitesse variable protection contre la corrosion l nergie
cintique du vent l tude comparative entre les machines lectriques utilises dans l nergie
olienne types des machins lectriques gnrateur synchrone gnrateur asynchrone a machine
asynchrone cage d cureuil b machine asynchrone double alimentation
a structure des machins asynchrones double alimentation a double alimentation par le stator
a double alimentation par le stator et le rotor
b application des machines asynchrones double alimentation c fonctionnement en gnratrice
a vitesse variable d fonctionnement a vitesse fixe e Intrt de la MADA conclusion

Chapitre Modlisation et tude du systme de conversion
. Introduction . Hypothses simplificatrices . Modlisation des machines asynchrones double
alimentation .. Modle et Identification des paramtres de la machine a Equations lectriques b
Equations des flux c L quation mcanique . Changement de repre . La transformation de Park
. Modlisation de l onduleur . Modlisation de la turbine olienne .. Hypothses simplificatrices
pour la modlisation mcanique de la turbine .. Modlisation de la turbine .. Modle du
multiplicateur .. Equation dynamique de l arbre . Schma de simulation . Rsultats de la
simulation . Interprtation . Conclusion
Chapitre Les diffrentes mthodes de commande de la MADA
Introduction tudes bibliographiques quelques mthode de commande utiliser dans la MADA .
la commande de la machine asynchrone double alimentation avec quatre boucles de
rgulation . la commande de la machine asynchrone double alimentation avec des
Convertisseurs statorique rotorique . la commande par logique floue de MADA la commande
scalaire de la MADA
conclusion

Chapitre la commande Vectorielle flux statorique oriente
introduction .types de commande vectorielle commande vectorielle directe commande
vectorielle indirecte contrles par orientation de flux choix de la position du rfrentiel
commande vectorielle par orientation du flux statorique relations entre puissance statorique
et courants rotoriques calcules des rgulateurs
Schma de simulation
les rsultats de la simulation interprtation des courbes conclusion
CONCLUSION GENERALE BIBLIOGRAPHIE ANNEXE
Chapitre Etat de l art des gnratrices oliennes
Chapitre tat de l art des gnratrices oliennes
Chapitre Etat de l art des gnratrices oliennes
.
Introduction
Une olienne pour rle de convertir l nergie cintique du vent en nergie lectrique. Ses diffrents
lments sont conus pour maximiser cette conversion nergique d une manire gnrale, une
bonne adquation entre les caractristiques couple/vitesse de la turbine et de la gnratrice
lectrique est indispensable. Plusieurs technologies sont utilises pour capter l nergie du vent
capteur axe vertical ou axe horizontal et les structures des capteurs sont de plus en plus
performantes. Une olienne doit comporter un systme qui permet de la contrler lectriquement
machine lectrique associe la commande. Un systme qui permet de la contrler mcaniquement
orientation des paliers de l olienne, orientation de la nacelle. Dans ce chapitre, on s intresse
essentiellement aux diffrents types d oliennes avec leurs constitutions et leurs principes de

fonctionnement, ainsi qu l tude de l nergie cintique du vent et les dfrents types de gnratrices.
La dernire partie de ce chapitre illustre les diffrentes structures des machines asynchrones
double alimentation, leur principe de fonctionnement, leurs applications et leur intrt.
Chapitre Etat de l art des gnratrices oliennes
.
La production olienne
La ressource olienne provient du dplacement des masses d air qui est directement li l
ensoleillement de la terre. Par le rchauffement de certaines zones de la plante et le
refroidissement d autres une diffrence de pression est cre et les masses d air sont en
perptuel dplacement. Aprs avoir pendant longtemps t oubli, cette nergie pourtant exploite
depuis l antiquit, connat depuis environ ans un dveloppement sans prcdent notamment d aux
premiers chocs ptroliers.
. Dfinition de l nergie olienne
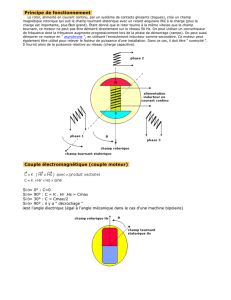
Un arognrateur, plus communment appel olienne, est un dispositif qui transforme une partie
de l nergie cintique du vent fluide en mouvement en nergie mcanique disponible sur un arbre
de transmission puis en nergie lectrique par l intermdiaire d une gnratrice .
Figure . Conversion de lnergie cintique du vent
L nergie olienne est une nergie renouvelable non dgrade, gographiquement diffuse et surtout
en corrlation saisonnire l nergie lectrique est largement plus demande en hiver et c est
souvent cette priode que la moyenne des vitesses des vents est la plus leve. de plus c est
une nergie qui ne produit aucun rejet atmosphrique ni dchet radioactif elle est
Chapitre Etat de l art des gnratrices oliennes toutefois alatoire dans le temps et son captage
reste assez complexe, ncessitant des mats et des pales de grandes dimensions jusqu m
pour des oliennes des plusieurs mgawatts dans des zones gographiquement de turbulences
. . L olienne se compose d une nacelle, d un mt, de pales et d un multiplicateur de vitesse.
La fabrication de ces diffrents lments est d une technologie avance, ce qui les rend par
consquent onreux. L nergie olienne fait partie des nouveaux moyens de production d lectricit
dcentralise proposant une alternative viable l nergie nuclaire sans pour autant prtendre la
remplacer l ordre de grandeur de la quantit d nergie produit tant largement plus faible. Les

installations peuvent tre ralises sur terre mais galement en mer o la prsence du vent est plus
rgulire.
.
Principe de fonctionnement d une olienne
Une olienne est constitue d une partie tournante, le rotor, qui transforme l nergie cintique en
nergie mcanique, en utilisant des profils arodynamiques. Le flux d air cre autour du profil une
pousse qui entrane le rotor et une trane qui constitue une force parasite. La puissance
mcanique est ensuite transforme soit en puissance hydraulique par une pompe, soit en
puissance lectrique par une gnratrice.
. Les diffrent type des turbines oliennes
Les solutions techniques permettant de recueillir l nergie du vent sont trs varies. On peut
diviser les oliennes en deux grandes familles, les oliennes axe vertical les oliennes axe
horizontal
Chapitre Etat de l art des gnratrices oliennes
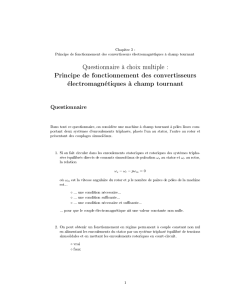
.. Les oliennes axe vertical
Ce type d olienne figure. a fait l objet de nombreuses recherches. Il prsente l avantage de ne
pas ncessiter de systme d orientation des pales et de possder une partie mcanique
multiplication et gnratrice au niveau du sol, facilitant ainsi les interventions de maintenance,
en revanche, certaines de ces oliennes doivent tre entranes au dmarrage et le mt, souvent
trs lourd, subit de fortes contraintes mcaniques poussant ainsi les constructeurs
pratiquement abandonner ces
arognrateurs sauf pour les trs faibles puissances au profit d oliennes axe horizontal .
Figure . olienne a axe vertical
.. Les oliennes axe horizontal
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
1
/
80
100%