Variation de vitesse des machines alternatives : Notes de cours
Telechargé par
Miloudi Fawzi

1 Variation de vitesse des machines alternatives
Les machines à courant alternatif sont des dispositifs électromécaniques complétement
réversibles pouvant fonctionner en moteurs et en génératrices.
Moteur
Génératrice
Energie
Electrique
Energie
Mécanique
Elles sont souvent utilisées dans la production de l’énergie électrique ou dans les
entrainements mécaniques. On distingue principalement deux types de machines à courant
alternatif :
Machine synchrone
Machine asynchrone
D’autres machines dérivent de ces types. Leurs domaines d’application va de la propulsion
navale (MW) à la micromécanique d’horlogerie (mW) Electroménager
Propulsion navale
Traction ferroviaire
Véhicule électrique
Ventilation
Machines informatiques
Horlogerie
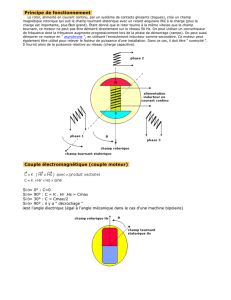
1.1 Principe général des machines alternatives
Création d’un champ tournant à partir de trois
bobines géométriquement déphasées de 120° et
alimentées par un système triphasé équilibré de
fréquence .
Les trois bobines produisent un champ magnétique de
module constant tournant à la vitesse

Si le rotor est une roue polaire équivalente à une
aiguille aimantée; il tournera à la même vitesse que le
champ tournant. C’est le principe du moteur
synchrone
Si le rotor est un disque métallique, des courants
induits vont créer un couple moteur. Le rotor
tournera à une vitesse inférieure à celle du champ
tournant.
1.1.1 Constitution
Le stator comporte essentiellement un empilage de tôles d'acier
constituant une couronne dans laquelle sont aménagées des
encoches. Ces encoches portent le bobinage statorique distribué sur
les pôles et répartie généralement sur trois enroulements placés à
120° .
Le rotor étant la partie mobile de la machine à courant alternatif. Sa
forme est toujours cylindrique. Ainsi pour les machines
asynchrones, le rotor est soit de type à cage ou à bagues. Sa fonction
principale est de supporter les forces électromotrices induites par
le champ statorique tournant à une vitesse donnée.
1.1.2 Vitesses et pulsations
Vitesse de synchronisme ou vitesse du champ tournant
Glissement: il caractérise la diminution de vitesse en
fonctionnement
Pulsation et fréquence rotorique
fonctionnement moteur
fonctionnement Génératrice
fonctionnement au synchronisme

fonctionnement moteur rotor bloqué
fonctionnement moteur frein : Marche freinage en contre courant
1.1.3 Modèle mas en régime permanent
Le moteur asynchrone se comporte
comme un transformateur alimentant
une charge constituée par l’impédance
du rotor (inductance et Résistance)
On donne sur la figure x.y le circuit
équivalent monophasé du MAS
ramené au stator
2
I
m
I
1
I
s
V
g
R2
Rs
Xm
x1x2
Rf
1
E
Figure 1
1.1.4 Bilan des puissances

Stator Rotor
Puissance
Utile
Puissance
Absorbée
Pertes
Mécaniques
Pertes
Fer Stator
1.1.5 Couple électromagnétique
En négligeant la chute de tension aux bornes de la résistance et de l’inductance de fuites l1
au stator , le courant I2 :
La puissance transmise est :
le couple électromagnétique s’exprime par :
le tracé du couple en fonction du glissement donne la courbe de la figure x.y
Figure 2
1.1.5.1 Courbes
le glissement est faible au voisinage du
synchronisme, le couple devient alors
proportionnel au glissement
Le couple présente un maximum pour la valeur
du glissement

Pour les glissements forts, le couple devient
inversement proportionnel au glissement
Temax
gmax
1.2 Principe de variation de vitesse de la mas
Pour modifier la caractéristique
,Plusieurs paramètres sont susceptibles de
modification en partant des expressions du glissement et du couple :
L’action sur ces paramètres ne doit pas dégrader toutefois le couple.
 6
7
8
6
7
8
1
/
8
100%