« M » est un entier « > 0 »

Page 1 sur 4
File : Filt-Num-Non-Recursif-Gervais-01
(GERVAIS p 235 )
En éléctronique, il est courant de faire un filtrage des signaux analogique à l’aide des
composants discrets R-L-C ;
Mais compte tenu de la puissance des calculateurs numériques (µ-C et DSP) actuels, il
est très aisé de faire un filtrage numérique des signaux numériques (signaux analogiques
qui ont été numérisés) ;
Ce filtrrage numérique est fait au moyen de ces calculateurs, au travers d’un algoriithme
de calcul qui est caractéristique du type de filtrage que l’on veut réaliser :
filtrage passe-bas ;
filtrage passe-haut ;
filtrage passe-bande ;
filtrage coupe-bande ;
En filtrage numérique, il existe deux type de filtres :
filtre numérique à réponse impulsionnelle finie (durée finie dans le temps de
cette réponse) <-> filtre RIF ;
filtre numérique à réponse impulsionnelle infinie (durée infinie dans le temps de
cette réponse) <-> filtre RII ;
Equation de récurrence d’un filtre : c’est une relation linéaire entre la valeur d’un
échantillon du signal de sortie à l’instant prèsent et des échantillons du signal d’entrée
à l’instant présent mais également aux instants antérieurs à cet instnat présent :
so (m . Te) . H (m . Te) =
0
jM
j
aj . si ((m – j) . Te) . H ((m - j) . Te)
Les coefficients aj caractérisent le filtre (LP, HP, BP, Notch)
Equation de récurrence Non recursive : exemple :
so (m . Te) . H (m . Te) =
0
jM
j
aj . si ((m – j) . Te) . H ((m - j) . Te)
Equation de récurrence recursive : exemple général
***********************************************************************
HERE
Filtres numériques
Pour les traitements lourds comme le filtrage des signaux video (ex), les circuits
analogiques qui réalisent les filtrages analogiques sont remplacés (de façon avantageuse)
par des filtres numériques car la complexite du gabarit du filtre à réaliser, est sans effet sur
la structure matérielle mais affecte uniquement l'algorithme c-à-d la composante logicielle
du filtre ;

Page 2 sur 4
De plus les structures numériques :
sont faciles à reproduire ;
sont exemptes de derive en température ;
et sont d'une fiabilîte supérieure pour les ordres élevés (dans les filtres) ;
En pratique, les methodes de synthèse consistent à trouver la fonction de transfert
en fréquence (fonction de transfert isochrone <-> en « j . » ) du filtre analogique puis de
la transposer dans le plan des « z » afin d'établir l'algorithme a programmer ;
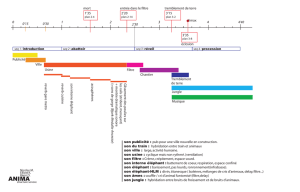
Classification
On classe les filtres :
selon leur réponse frequentielle :
Figure 11.1 / p 235/ GERV
On se limite à la bande de f requence « [ 0 ; e/ 2 ] » imposée par le théoreme de
SHANNON ;
ou bien selon leur algorithme :
Filtres non récursifs ou filtres « RIF » <-> filtre à « réponse impulsionnelle finie » ;
Filtres récursifs ou filtres « RII » <-> filtre à « réponse impulsionnelle infinie » :
***********************************************************************
***********************************************************************
Filtres non récursifs ou filtres « RIF »
Les filtres non récursifs sont caractérisés par
[ une équation de récurrence/ un algorithme ] dont la [ structure / forme ] est :
so (m . Te) . H (m . Te) =
0
jM
j
aj . si ((m – j) . Te) . H ((m - j) . Te)
(c’est le forme générale de l’algorithme associé au filtre numérique)
où :
les coefficients « aj » sont les coefficients réels qui caractérisent l’action de ce
filtre numérique non récursif linéaire : passe-bas, passe-haut, passe-bande ;
La concetption d’un filtre numérique NON récursif, consiste ene la dététermination
de ces coefficients « aj » ;
« M » est un entier « > 0 » ;
m = 0, 1, 2, ..... ;
M m » ;

Page 3 sur 4
« so (m . Te) . H (m . Te) » est l’échantillon à l’instant « m . Te » du signal
discret « { so (n . Te) . H (n . Te) } » de sortie de ce filtre numérique ;
« si (m . Te) . H (m . Te) » est l’échantillon à l’instant « m . Te » du signal
discret « { so (n . Te) . H (n . Te) } » d’entrée de ce filtre numérique ;
D’après l’équation de récurrence « so (m . Te) . H (m . Te) =
=
0
jM
j
aj . si ((m – j) . Te) . H ((m - j) . Te)» => l’échantillon « so (m . Te) . H (m . Te) » de
sorte à l’instant « m . Te », dépend uniquement des
échantillons « si ((m – j) . Te) . H ((m - j) . Te) », j = 0, 1, ... M, du signal
discret « { so (n . Te) . H (n . Te) } » d’entrée de ce filtre numérique, aux instants
précédents « (m - 1) . Te » « (m - 2) . Te », .....
Ainsi, à chacun des instants « t = m . Te », chaque échantillon « so (m . Te) . H (m . Te) » de
sortie, dépend uniquement des échantillons « si ((m – j) . Te) . H ((m - j) . Te) » d'entrée
à des instants « t = (m – j) . Te » précédents ;
NB : l’algorithme
so (m . Te) . H (m . Te) =
0
jM
j
aj . si ((m – j) . Te) . H ((m - j) . Te) associé au filter non
recursif, montre que l’échantillon « so (m . Te) . H (m . Te) » de sortie à
l’instant « m . Te », [ ne dépend que / dépend uniquement ] des échantillons
si ((m – j) . Te) . H ((m - j) . Te) à j = 0, 1, 2, …. M du signal « { si (n . Te) . H (n . Te) } »u
discret d’entrée de ce filtre numérique, à l’instant « m . Te », et aux instants précédents
« (m – 1) . Te », « (m – 2) . Te » ….. ;
Le schema fonctionnel qui peut représenter les filtres non recursifs, est :
figure 11.2 / p 236/ GERV
Exemple :
Filtre « RIF » dont l’algorithme est :
so (m . Te) . H (m . Te) =
= (1/2) . ( si (m . Te) . H (m . Te) + si ((m – 1) . Te) . H ((m - 1) . Te)) ;
=> il faut donner une conditions initiale
Pourquooi un filtre non récursif, s’appelle un filtre RIF ?
On prend comme signal discret « { so (n . Te) . H (n . Te) } » d’entrée de ce filtre
numérique, le signal impulsion unité « { so (n . Te) . H (n . Te) } { (n . Te) } =

Page 4 sur 4
= { 1, 0, 0, .... } » => la réponse de ce filtre « RIF », à cette impulsion unité
(échantillonnée), est :
m . Te
- Te
0 . Te
1 . Te
2 . Te
3 . Te
4 . Te
5 . Te
si (m . Te) . H (m . Te)
0
1
0
0
0
0
0
si ((m – 1) . Te) .
. H ((m - 1) . Te)
0
0
1
0
0
0
0
so (m . Te) . H (m . Te)
0
0,5
0,5
0
0
0
0
Ici, avec ce filtre numérique Non recusif, on constate que les échantillons
« so (m . Te) . H (l . Te) » du singal discret de sortie décroissent à mesure que le temps
s’écoule <-> « m » augmente » mais ces échantillons s’’annulent brutalement à partir
d’un certain instant discret ;
(Faire un programme en Turbo Pascal ! ! ! !)
Les filtres NON recursifs sont appelés filtres a reponse impulsionnelle finie parce que
« so (m . Te) . H (m . Te) = constante » au bout d'un temps donné ;
Les filtres « RIF » sont systematiquement stables
car «
lim
m
so (m . Te) . H (m . Te) = 0 » est toujours vérifié en régime impulsionnel ;
***********************************************************************
***********************************************************************
1
/
4
100%